











-
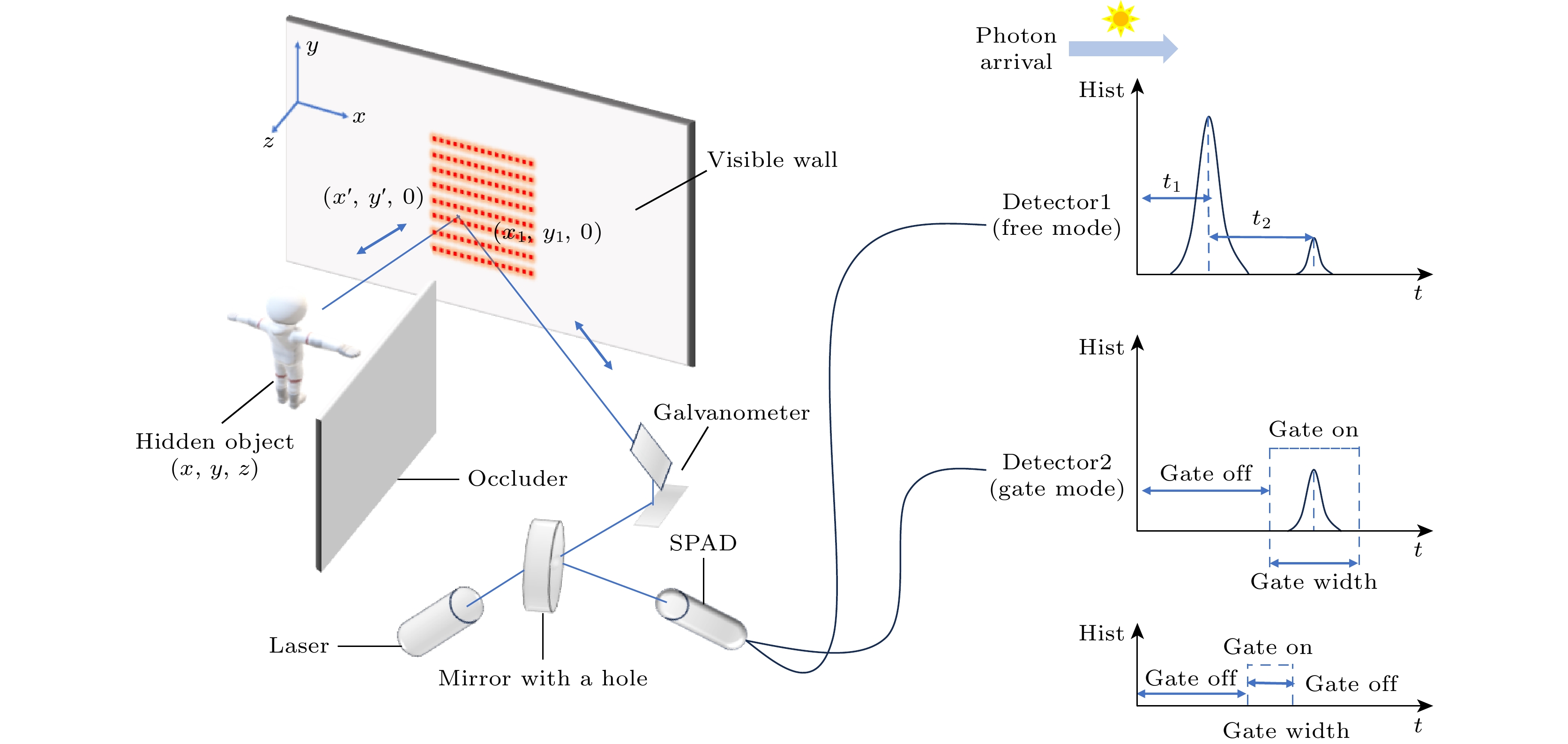
Non-line-of-sight (NLOS) imaging is an emerging optical imaging technique used for detecting hidden targets outside the line of sight. Due to multiple diffuse reflections, the signal echoes are weak, and gated single-photon avalanche diode (SPAD) plays a pivotal role in signal detection under low signal-to-noise ratio (SNR) conditions. However, when gated SPAD is used for detecting a target signal, existing methods often depend on prior information to preset the gate width, which cannot fully mitigate non-target signal interference or signal loss. Additionally, these methods encountered some problems such as large data acquisition volumes and lengthy processing times. To address these challenges, an adaptive gating algorithm is proposed in this work based on the principle of maximizing the distance from the vertex of a triangle to its base. The algorithm possesses advantages of the linear variation in scan point positions and the echo information from specific feature points. It can automatically identify echo signals and compute their widths without additional prior information or manual intervention. This method reduces the amount of data collected, improves processing efficiency, and has other benefits. Moreover, a confocal NLOS imaging system based on gated SPAD is developed to validate the proposed algorithm. The work further quantitatively evaluates the enhancement of target signal detection and image quality achieved by gated SPAD, and compares its imaging performance with leading NLOS image reconstruction algorithms. Experimental results demonstrate that the adaptive gating algorithm can effectively identify echo signals, facilitate automatic adjustment of gating parameters, and significantly improve target imaging quality while reducing data acquisition volume and enhancing processing efficiency.
-
Keywords:
- non-line-of-sight imaging /
- adaptive gating /
- signal-to-noise ratio
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] -

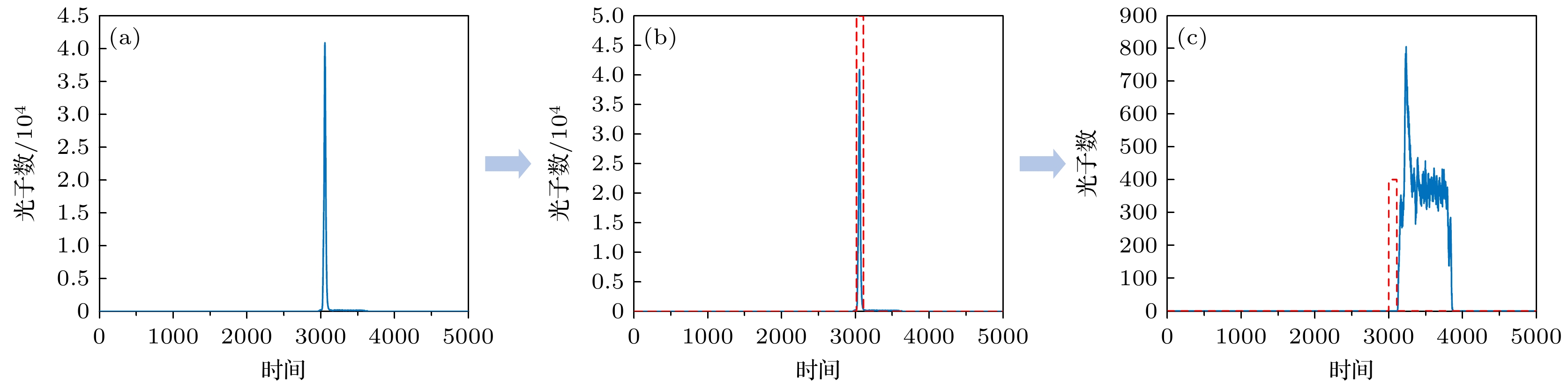
未抑制一次
回波信号抑制一半一次
回波信号完全抑制一次
回波信号一次回波峰值 36190 8811 0 目标回波峰值 372 952 805 信号信噪比 16.79 19.48 28.75 主观 目标信号被淹没 目标信号可见 目标信号突出  DownLoad: CSV
DownLoad: CSV
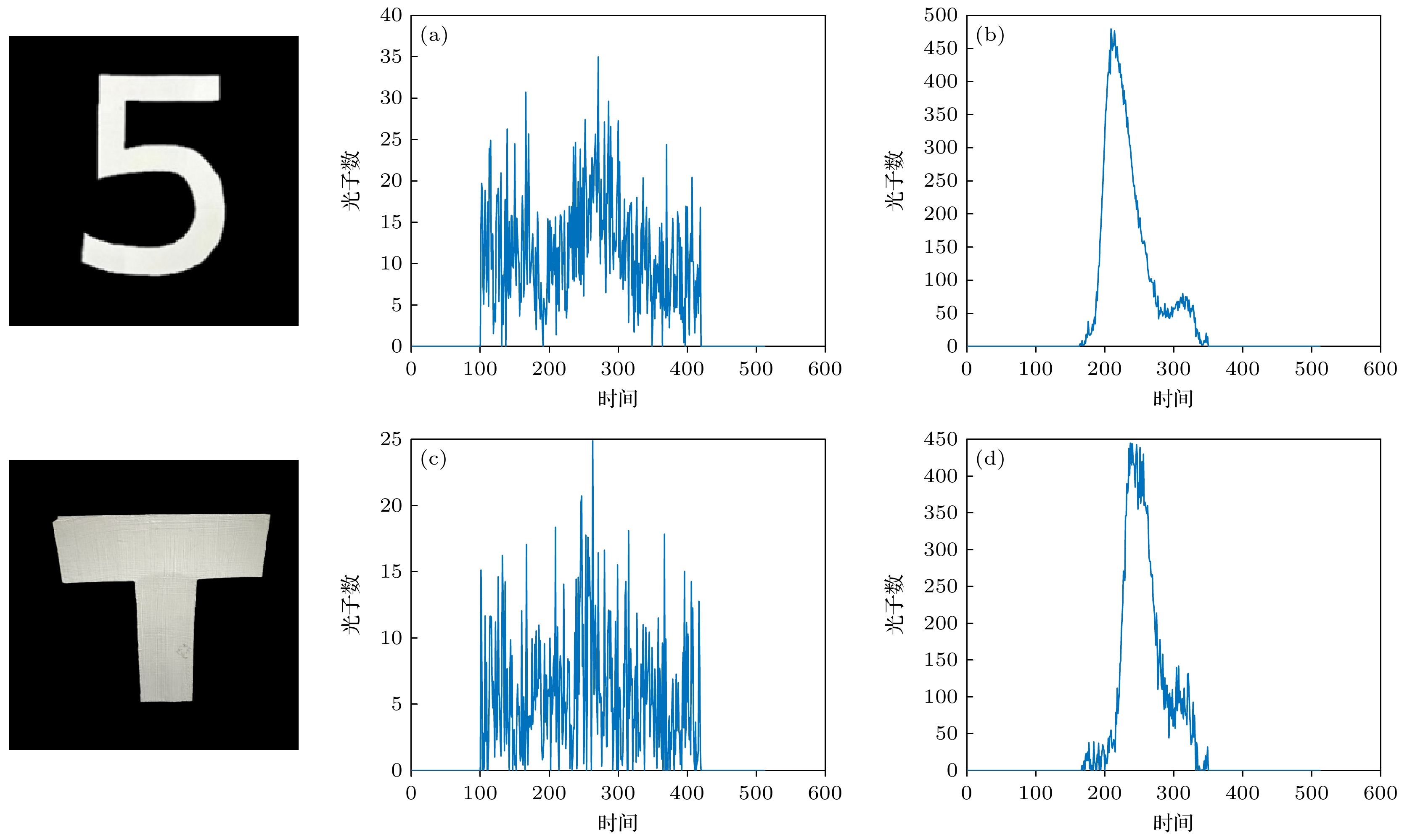
目标5信号
(自由模式)目标5信号(门控模式) 目标T信号
(自由模式)目标T信号
(门控模式)目标回波峰值 35 480 25 445 信号信噪比 6.79 25.54 6.15 23.21 主观 目标波形可见 目标波形清晰 目标波形可见 目标波形清晰
DownLoad: CSV
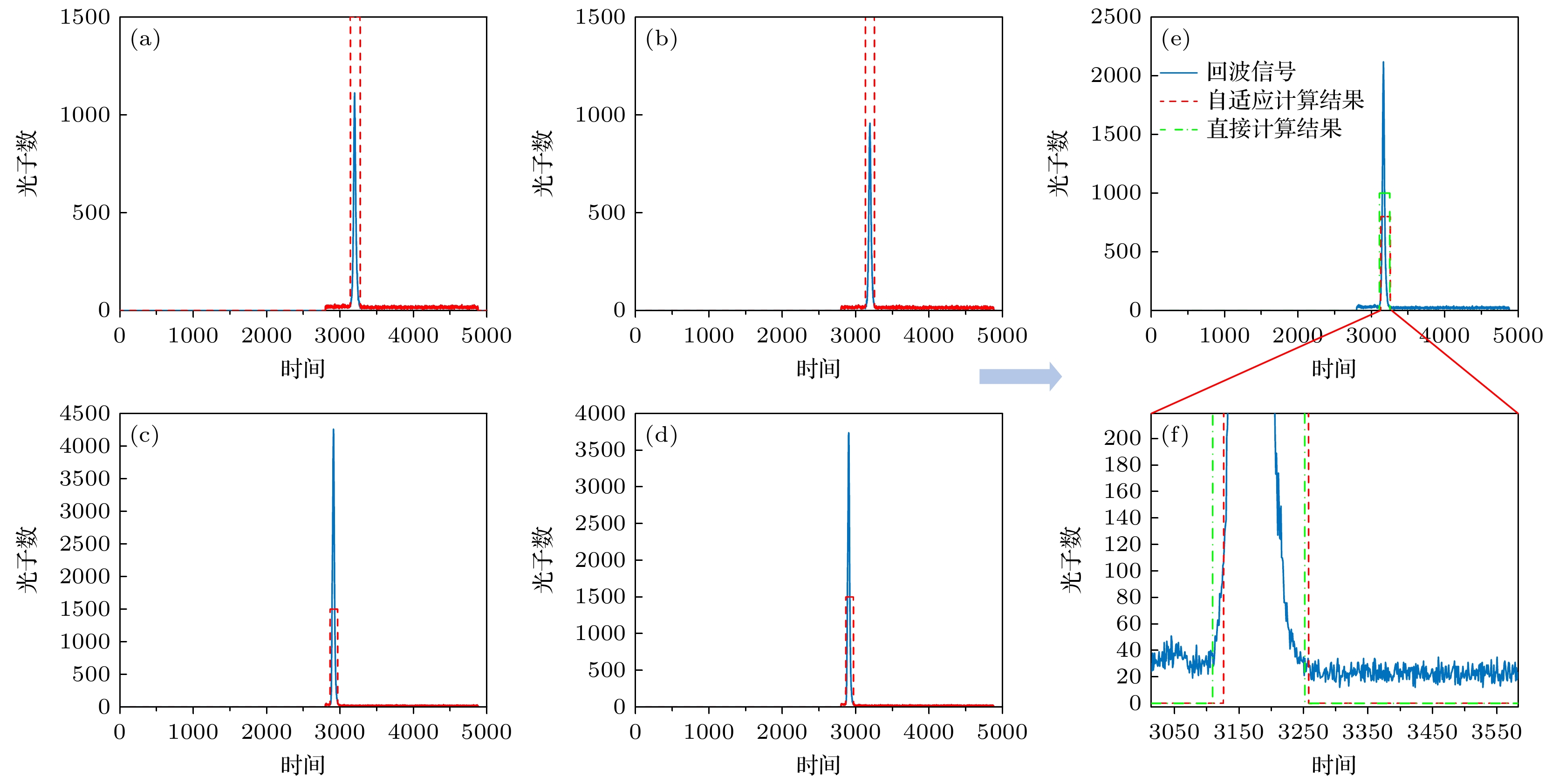
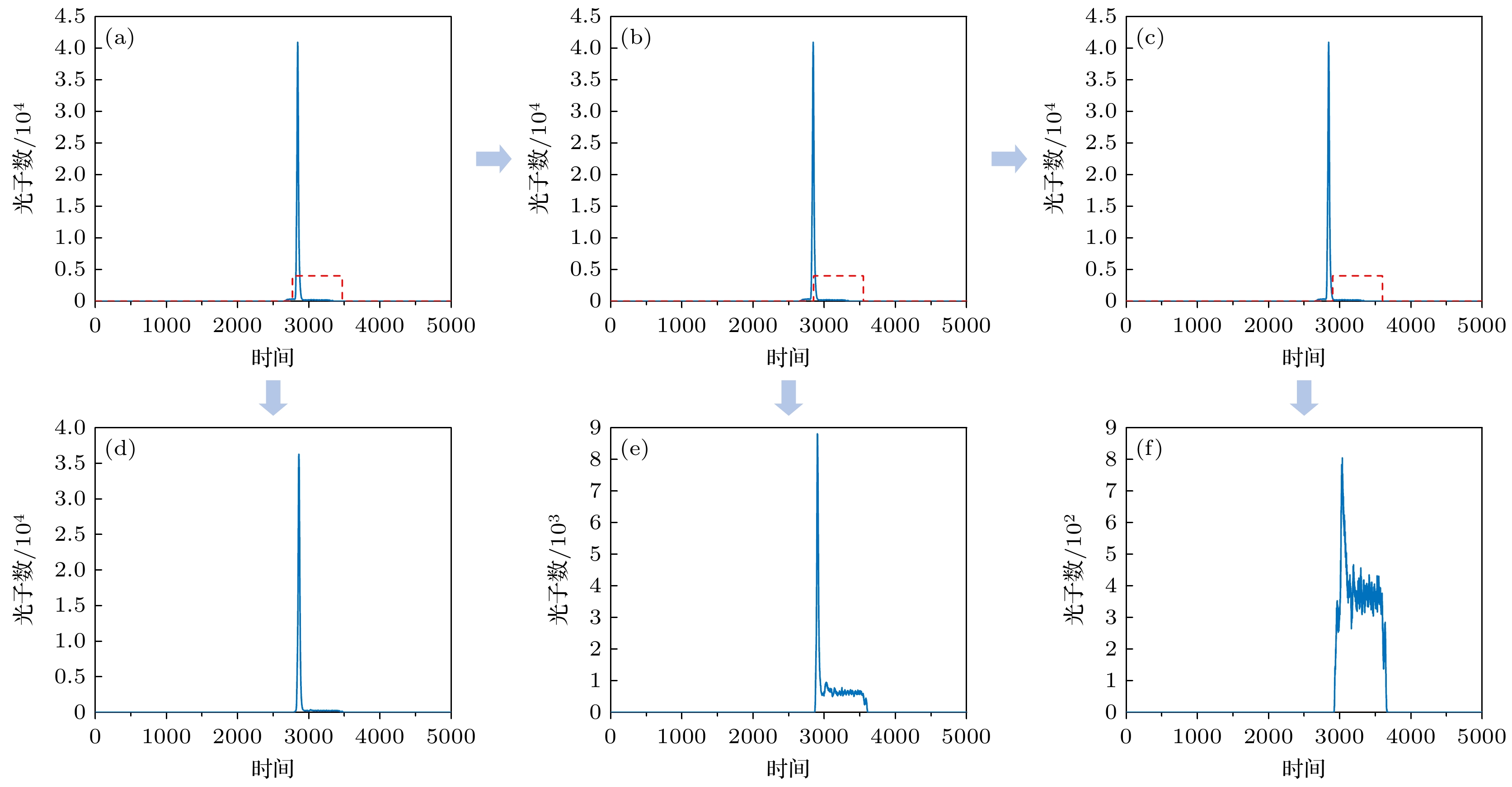
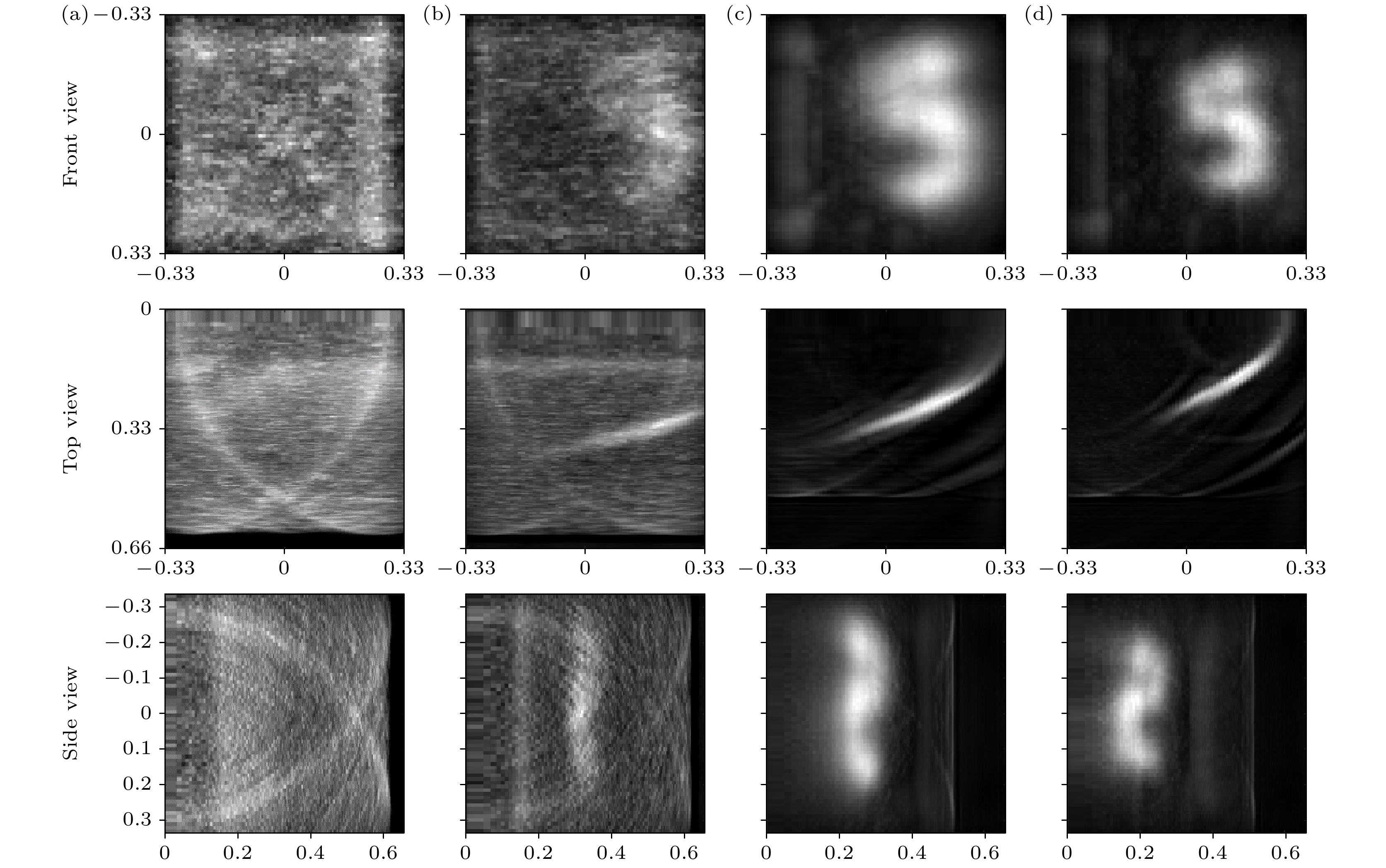
自由模式 未抑制中介面
回波信号抑制中介面
回波信号自适应门控
控制算法峰值
信噪比6.94 9.52 10.70 11.4932 结构
相似度0.56 0.73 0.81 0.8466 相关系数 0.007 0.31 0.56 0.64885 主观 无法识别
目标可见目标
轮廓目标轮廓
清晰目标轮廓
清晰
DownLoad: CSV
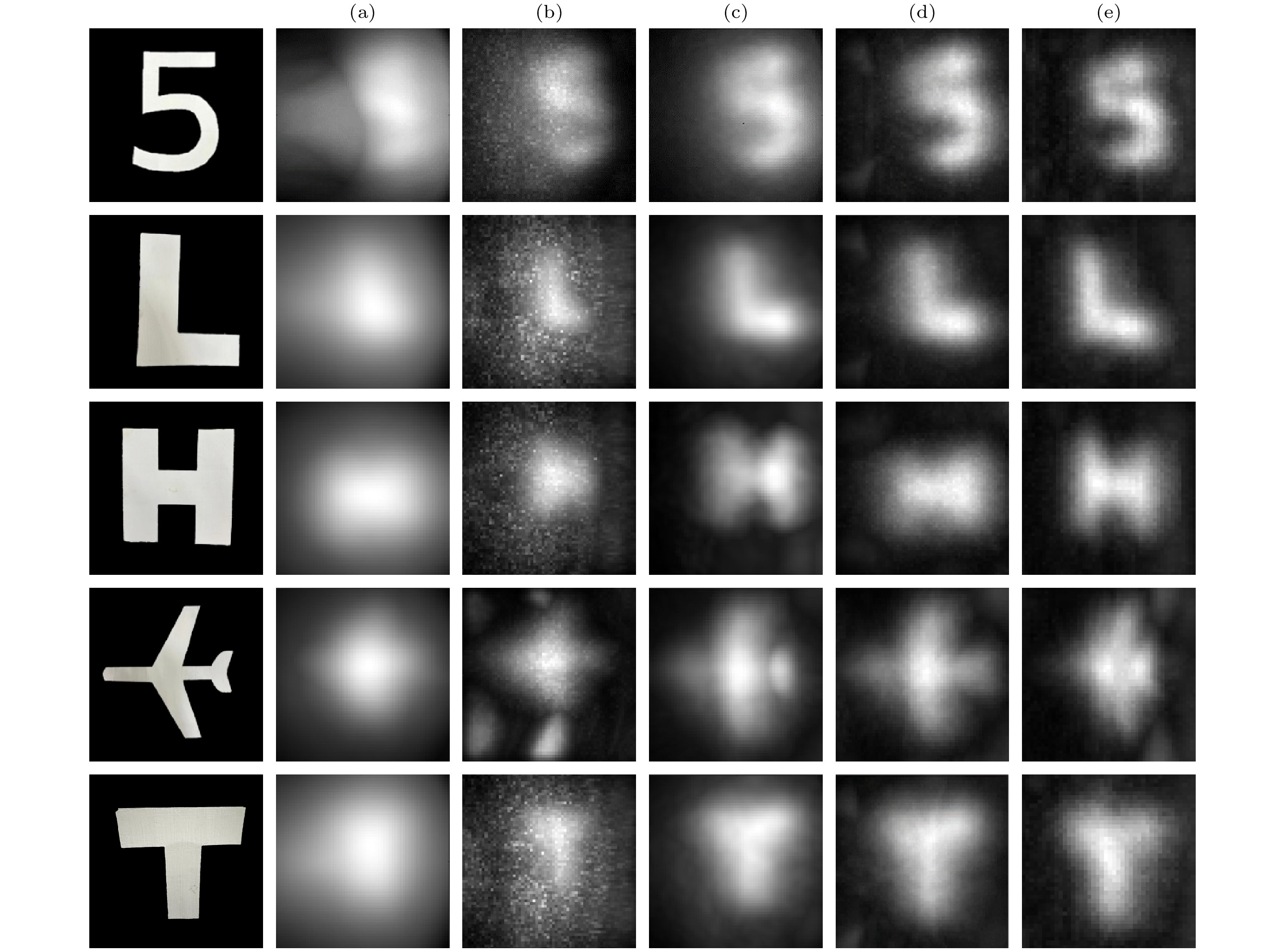
评价指标 BP F-K V-W LCT 本文 目标5 峰值信噪比 7.0311 10.15 8.9784 10.7017 11.4932 结构相似度 0.6443 0.7873 0.7408 0.8107 0.8466 相关系数 0.4545 0.5098 0.5315 0.5703 0.6489 主观 目标模糊 可见目标轮廓 目标轮廓清晰 目标轮廓清晰 目标轮廓清晰 目标L 峰值信噪比 7.1744 9.543 8.4819 11.179 11.3109 结构相似度 0.6689 0.7781 0.7825 0.8535 0.8621 相关系数 0.386 0.4459 0.5093 0.6014 0.6587 主观 目标模糊 可见目标轮廓 目标轮廓清晰 目标轮廓清晰 目标轮廓清晰 目标H 峰值信噪比 8.8224 9.4324 9.4568 10.1954 10.558 结构相似度 0.7477 0.8071 0.8163 0.8417 0.8564 相关系数 0.6077 0.4839 0.5092 0.6017 0.6275 主观 目标模糊 可见目标轮廓 目标轮廓清晰 目标轮廓清晰 目标轮廓清晰 目标Plane 峰值信噪比 9.8436 11.6533 11.4687 12.2066 11.9239 结构相似度 0.7745 0.8545 0.8465 0.8533 0.8608 相关系数 0.6019 0.5541 0.6223 0.6524 0.6325 主观 目标模糊 可见目标轮廓 目标轮廓清晰 目标轮廓清晰 目标轮廓清晰 目标T 峰值信噪比 7.9285 11.1673 11.2831 12.7401 12.604 结构相似度 0.6883 0.8106 0.8328 0.8812 0.877 相关系数 0.6566 0.6714 0.7388 0.7102 0.7696 主观 目标模糊 可见目标轮廓 目标轮廓清晰 目标轮廓清晰 目标轮廓清晰
DownLoad: CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23]


 DownLoad:
DownLoad:














Catalog
Metrics
- Abstract views: 1233
- PDF Downloads: 42
- Cited By: 0