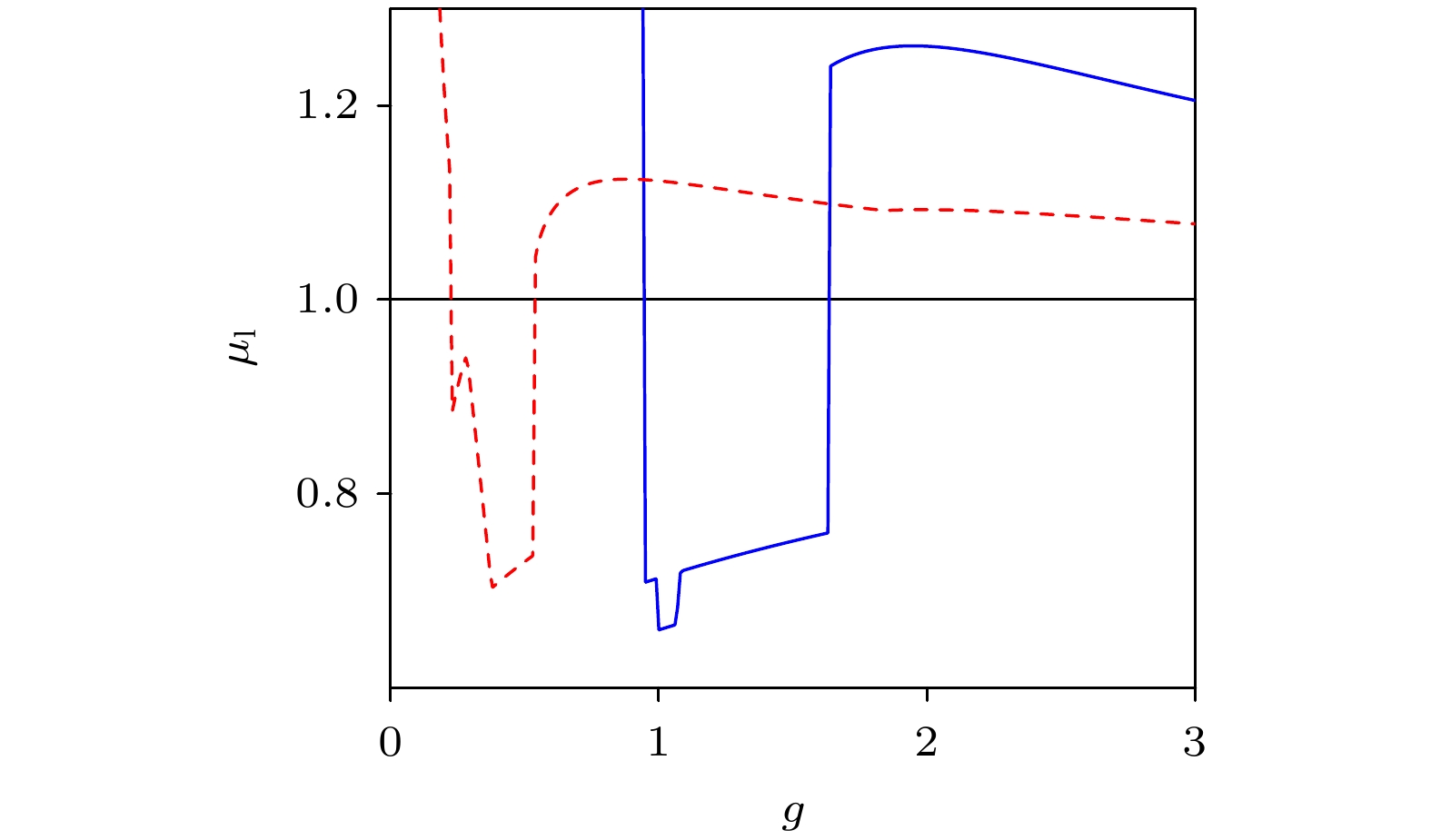
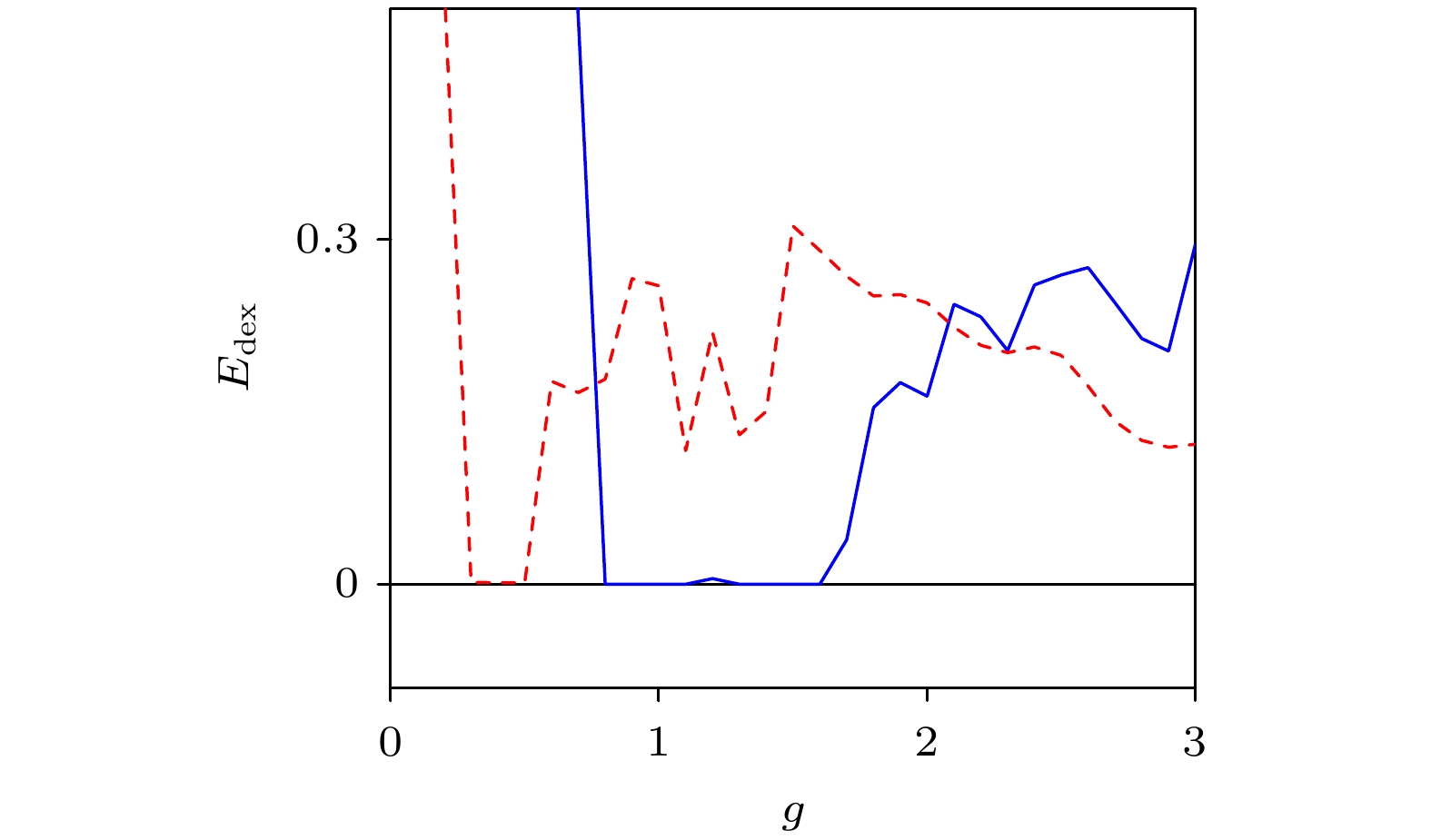
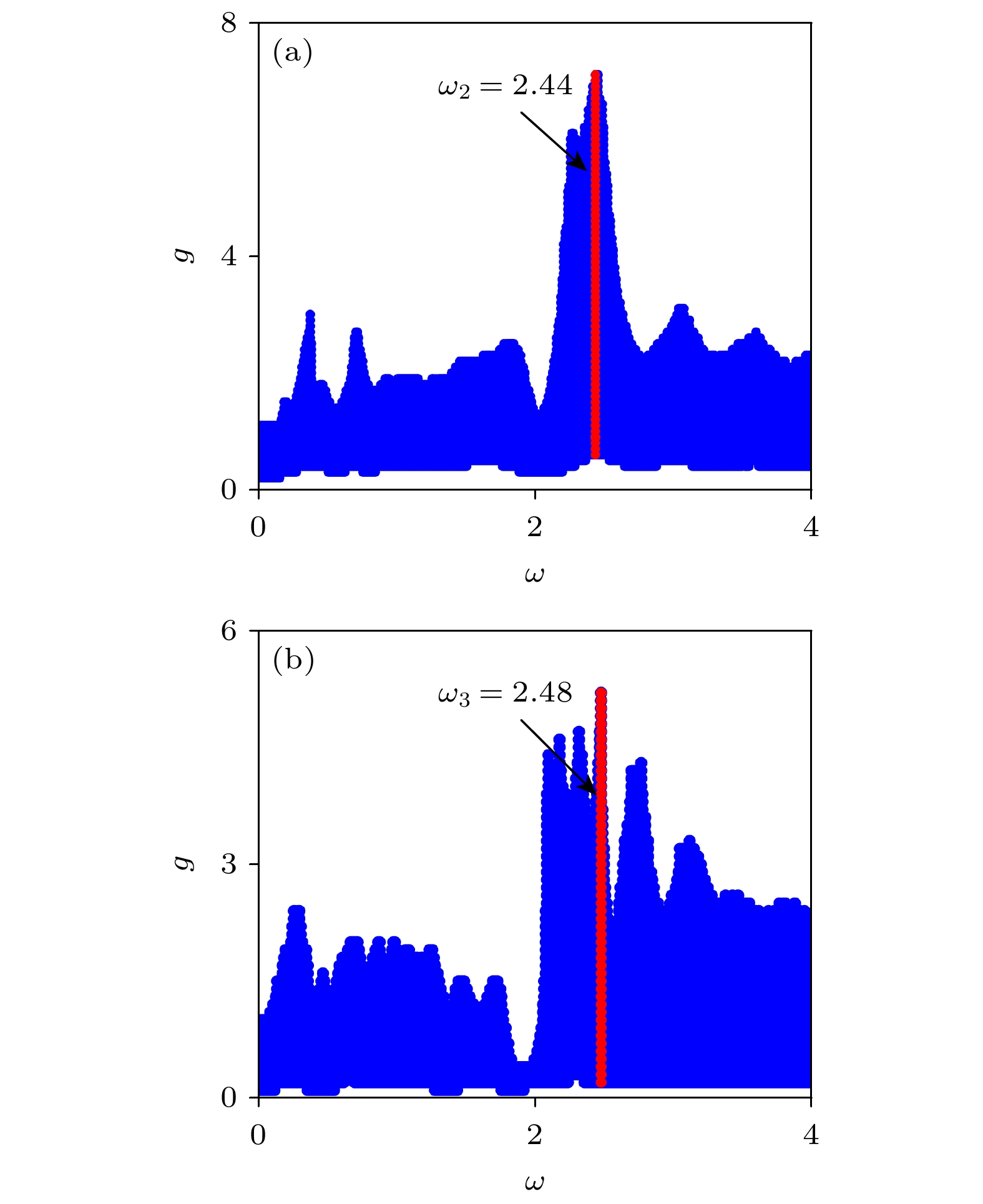
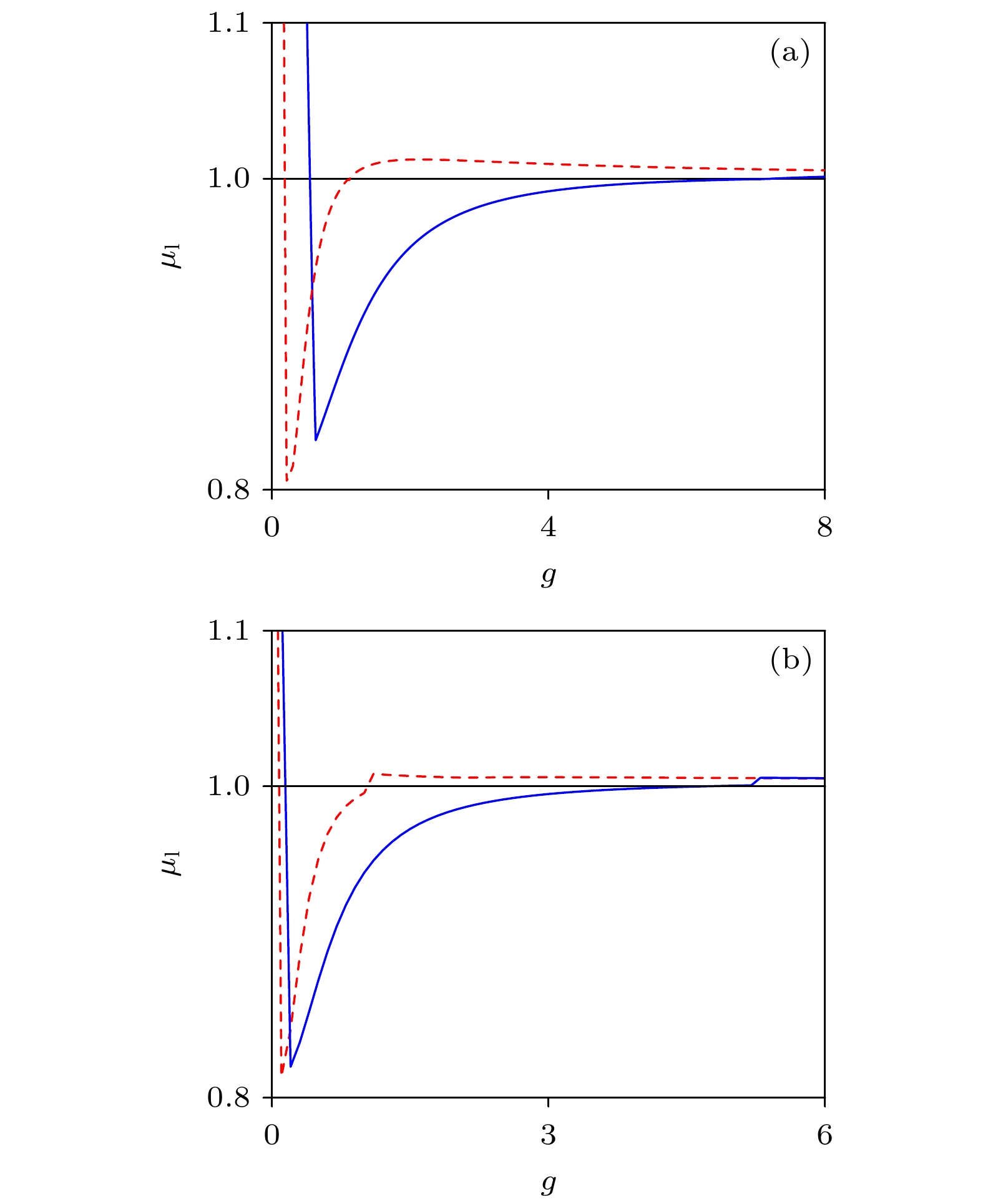
Control parameters are frequently subjected to certain restrictions in the engineering practice of chaos control. It is difficult to stabilize multi-rotation unstable periodic trajectory when the stability range is too small and outside the restrictions of control parameters. Thus, it is fundamentally important to expand the stability range of the controlled multi-rotation unstable periodic trajectory by using an applicable method. In this work, the original extended time-delay feedback control is improved based on the time-varying switching strategy, which leads to the time-varying switching extended time-delay feedback control. The time-varying switching extended time-delay feedback control only applies the control to the controlled system in a specific period, and does not apply the control to it in other periods, this is different from the continuous control of the original extended time-delay feedback control. The specific performance of the time-varying switching extended time-delay feedback control in stabilizing unstable multi-rotation periodic trajectories is investigated by case studies. The maximum Floquet multiplier of the controlled periodic trajectory is calculated, and the relationship between the stability region of the controlled multi-rotation periodic trajectory and the switching frequency is obtained. The results show that with the increase of switching frequency, the stability region of the controlled multi-rotation periodic trajectory presents a non-smooth change. In particular, the stability region of the time-varying switching extended time-delay feedback control is significantly larger than that of the original extended time-delay feedback control when an appropriate switching frequency is selected.















 DownLoad:
DownLoad:









