











-
Chaotic time series can well reflect the nonlinearity and non-stationarity of real environment changes. The traditional kernel adaptive filter (KAF) with second-order statistical characteristics suffers performance degeneration dramatically for predicting chaotic time series containing noises and outliers. In order to improve the robustness of adaptive filters in the presence of impulsive noise, a nonlinear similarity measure named Cauchy kernel loss (CKL) is proposed, and the global convexity of CKL is guaranteed by the half-quadratic (HQ) method. To improve the convergence rate of stochastic gradient descent and avoid a local optimum simultaneously, the conjugate gradient (CG) method is used to optimize CKL. Furthermore, to address the issue of kernel matrix network growth, the Nyström sparse strategy is adopted to approximate the kernel matrix and then the probability density rank-based quantization (PRQ) is used to improve the approximation accuracy. To this end, a novel Nyström Cauchy kernel conjugate gradient with PRQ (NCKCG-PRQ) algorithm is proposed for the prediction of chaotic time series in this paper. Simulations on prediction of synthetic and real-world chaotic time series validate the advantages of the proposed algorithm in terms of filtering accuracy, robustness, and computational storage complexity.
-
Keywords:
- prediction of chaotic time series/
- kernel adaptive filtering/
- Cauchy kernel loss/
- Nyström method
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] -
输入: 输入输出对$\left\{ { {{\boldsymbol{u}}_k}, {d_k} } \right\}, k{\text{ = } }1, 2, \cdot \cdot \cdot$ 初始化参数: $ {\boldsymbol{\hat u}}(i) $为PRQ采样后样本点; $ {\boldsymbol{\varLambda }} $和W分别为有关$ {\boldsymbol{\hat U}} $核矩阵的特征值降序排列的对角矩阵和对应特征向量构成列正交矩阵; ${ {\boldsymbol{K} }_c}(1) = [\kappa ({\boldsymbol{u} }(1), {\boldsymbol{\hat u} }(1)), \cdots , \kappa ({\boldsymbol{u} }(1), {\boldsymbol{\hat u} }(m))]$为初始核向量; 映射输入$ {{\boldsymbol{z}}_1} = {{\boldsymbol{\varLambda }}^{ - 1/2}}{{\boldsymbol{W}}^{\text{T}}}{{\boldsymbol{K}}_c}{(1)^{\text{T}}} $; 权重$ {\boldsymbol{\varOmega }}_1^z = 0 $; 加权函数$ {\zeta _1} = {\exp}( - {s_1})/\left\{ {{\delta ^2}\left[ {{\eta ^{ - 1}} + {s_1}{\exp}( - {s_1})} \right]} \right\} $; 期望$ {d_1}{\text{ = }}{({{\boldsymbol{\varOmega }}_1}^z)^{\text{T}}}{{\boldsymbol{z}}_1} $; 相关矩阵$ R_1^z = {\zeta _1}{{\boldsymbol{z}}_1}{\boldsymbol{z}}_1^{\rm T} $; 互相关向量${\boldsymbol{c}}_1^z={\zeta _1}{d_1}{{\bf{z}}_1}$; 冗余向量${\boldsymbol{r}}_1^z ={\boldsymbol{ c}}_1^z - {\boldsymbol{R}}_1^z{\boldsymbol{\varOmega } }_1^z$; 方向向量${\boldsymbol{p}}_1^z = {\boldsymbol{r}}_1^z$, 遗忘因子$ \lambda {\text{ = }}0.999 $
循环$ \left( {k{\text{ = 2}}, 3, \cdot \cdot \cdot } \right) $:1.输入核向量${ {\boldsymbol{K} }_c}(i) = [\kappa ({\boldsymbol{u} }(i), {\boldsymbol{\hat u} }(1)), \cdots , \kappa ({\boldsymbol{u} }(i), {\boldsymbol{\hat u} }(m)]$;
2.映射输入${\boldsymbol{z} }( \cdot ) = { {\boldsymbol{\varLambda } }^{ - 1/2} }{ {\boldsymbol{W} }^{\text{T} } }{[\kappa ( \cdot , {\boldsymbol{\hat u} }(1)), \cdots , \kappa ( \cdot , {\boldsymbol{\hat u} }(m))]^{\text{T} } }$;
3.误差更新$ {e_{k + 1}} = {d_{k + 1}} - {\left( {{\boldsymbol{\varOmega }}_k^z} \right)^{\text{T}}}{{\boldsymbol{z}}_{k + 1}} $, 加权函数$ {\zeta _k} = {\exp}( - {s_k})/\left\{ {{\delta ^2}\left[ {{\eta ^{ - 1}} + {s_k}{\exp}( - {s_k})} \right]} \right\} $
4.自相关矩阵更新${\boldsymbol{R}}_{k + 1}^z = \lambda {\boldsymbol{R}}_k^z + {\zeta _{k + 1} }{ {\boldsymbol{z} }_{k + 1} }{\boldsymbol{z} }_{k + 1}^{\rm T}$, 计算步长${\alpha _k} = \frac{ { { {\left( {{\boldsymbol{p}}_k^z} \right)}^{\text{T} } }{\boldsymbol{r}}_k^z} }{ { { {\left( {{\boldsymbol{p}}_k^z} \right)}^{\text{T} } }{\boldsymbol{R}}_{k + 1}^z{\boldsymbol{p}}_k^z} }$;
5.权重更新${\boldsymbol{\varOmega } }_{k + 1}^z = {\boldsymbol{\varOmega } }_k^z + {\alpha _k}{\boldsymbol{p}}_k^z$, 残差向量更新${\boldsymbol{r}}_{k + 1}^z = \lambda {\boldsymbol{r}}_k^z - {\alpha _k}{\boldsymbol{R}}_{k + 1}^z{\boldsymbol{p}}_k^z + {\zeta _{k + 1} }{{\bf{z}}_{k + 1} }{{\boldsymbol{e}}_{k + 1} }$;
6.计算步长 ${\beta _k} = \frac{ { { {\left( {{\boldsymbol{r}}_{k + 1}^z} \right)}^{\text{T} } }\left( {{\boldsymbol{r}}_{k + 1}^z - {\boldsymbol{r}}_k^z} \right)} }{ { { {\left( {{\boldsymbol{r}}_k^z} \right)}^{\text{T} } }{\boldsymbol{r}}_k^z} }$, 共轭方向更新${\boldsymbol{p}}_{k + 1}^z = {\boldsymbol{r}}_{k + 1}^z + {\beta _k}r_k^z$
循环终止 DownLoad:
CSV
DownLoad:
CSV
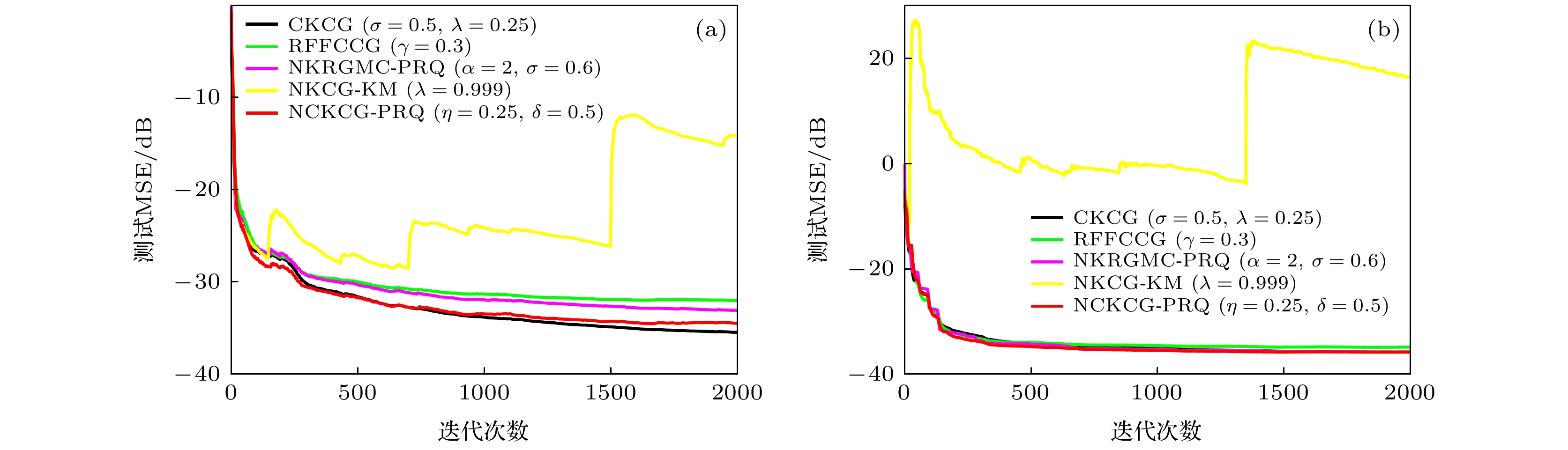
实验模型 算法 字典数目 运算时间/s 稳态MSE/dB MG混沌时间序列 CKCG 2000 41.486 –35.443 RFFCCG 60 2.095 –32.006 NKRGMC-PRQ 60 2.383 –33.068 NKCG-KM 60 3.745 N/A NCKCG-PRQ 60 1.584 –34.446 DownLoad:
CSV
实验模型 算法 字典数目 运算时间/s 稳态MSE/dB 蔡氏混沌时间序列 CKCG 2000 42.618 –35.840 RFFCCG 13 1.128 –34.926 NKRGMC-PRQ 13 0.988 –35.819 NKCG-KM 13 1.146 N/A NCKCG-PRQ 13 0.957 –35.865 DownLoad:
CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36]


 DownLoad:
DownLoad:




Catalog
Metrics
- Abstract views:3882
- PDF Downloads:59
- Cited By:0