











-
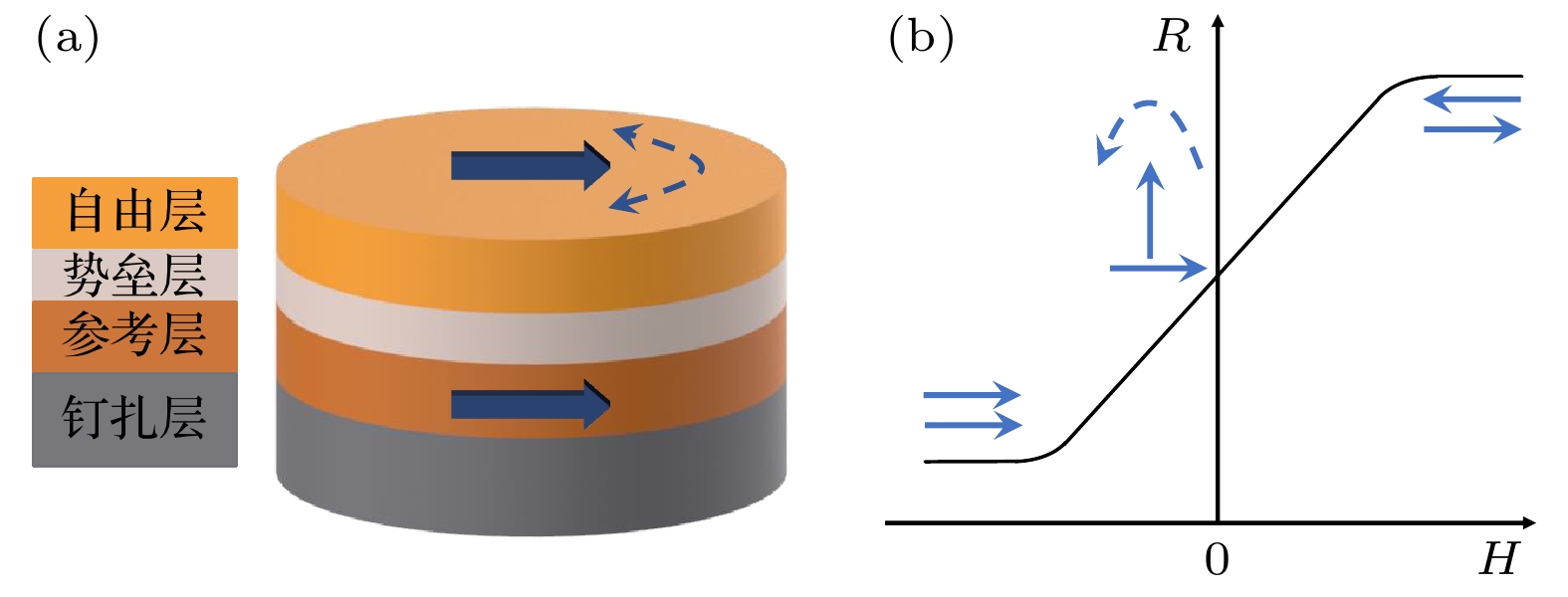
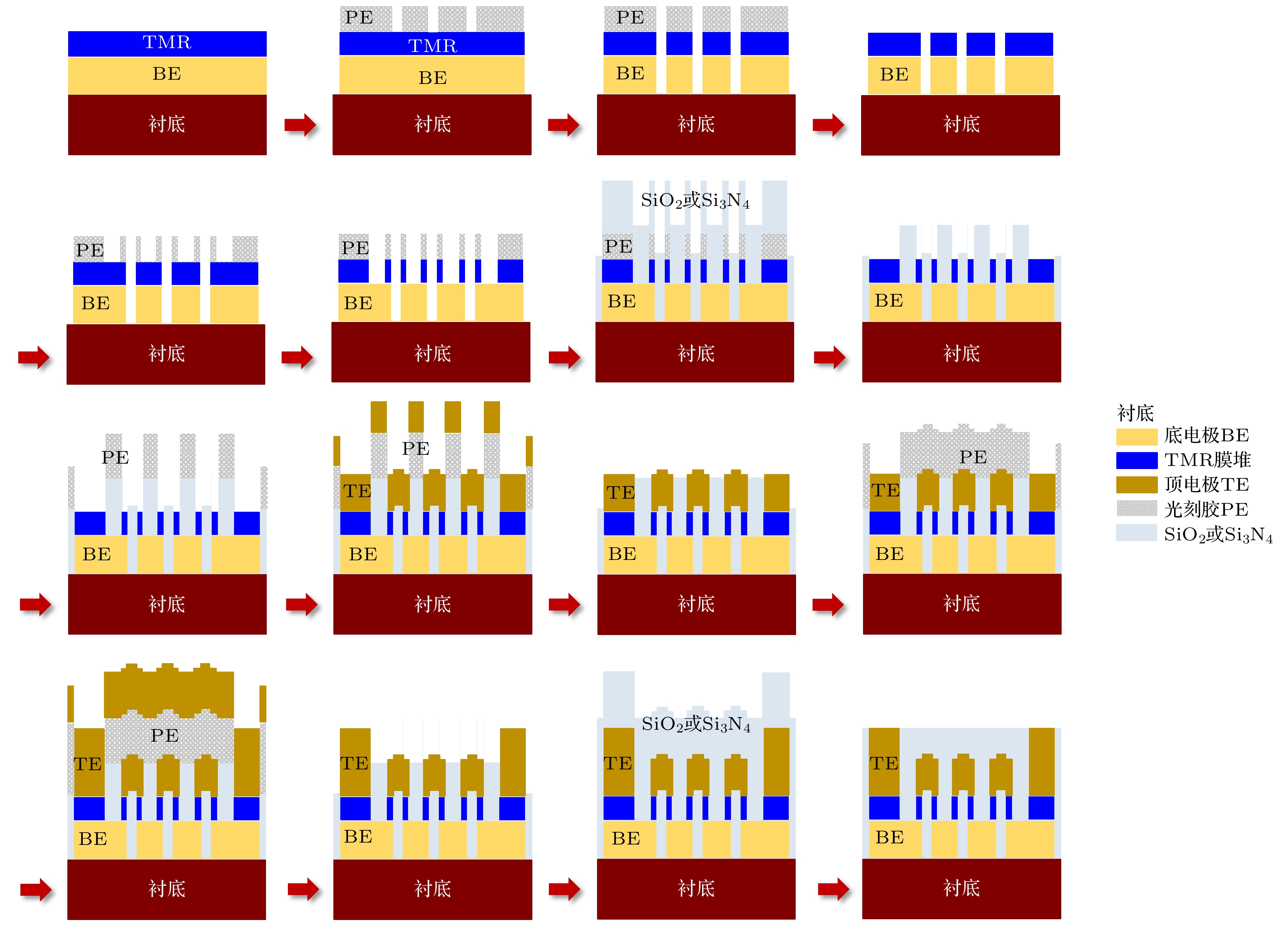
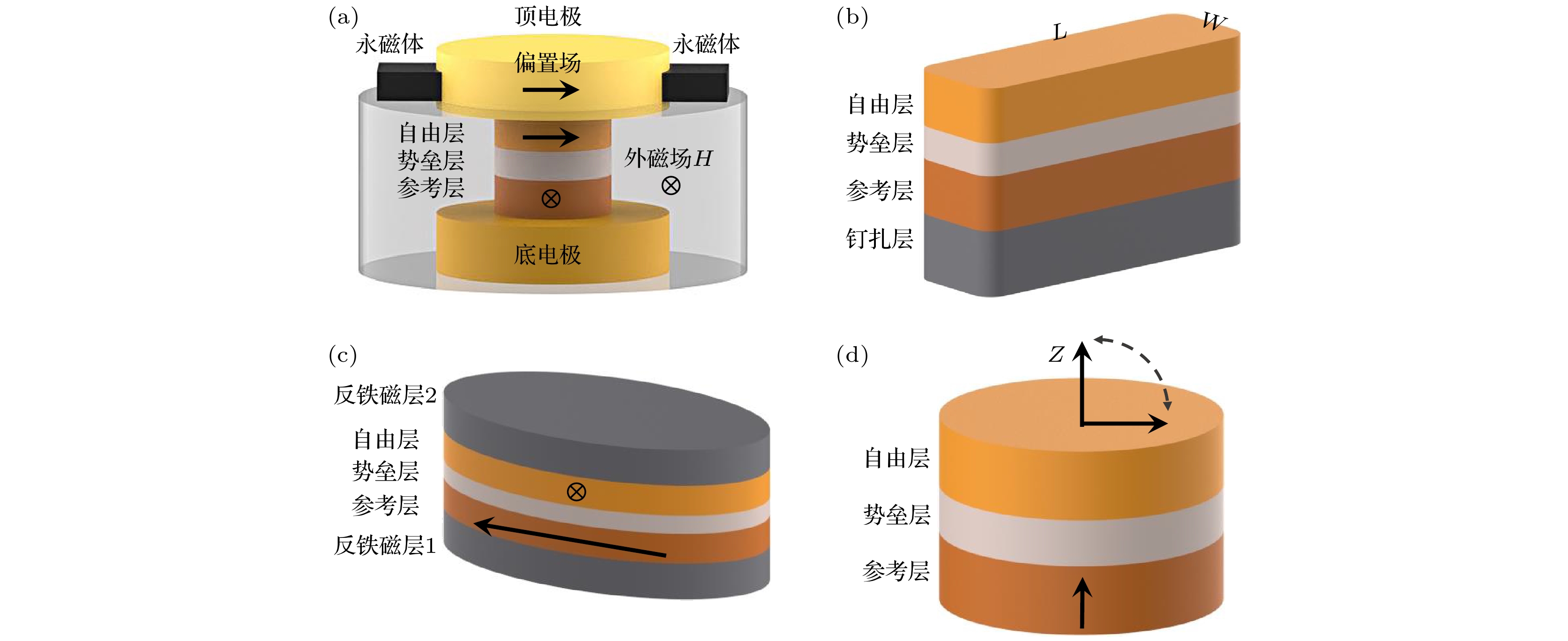
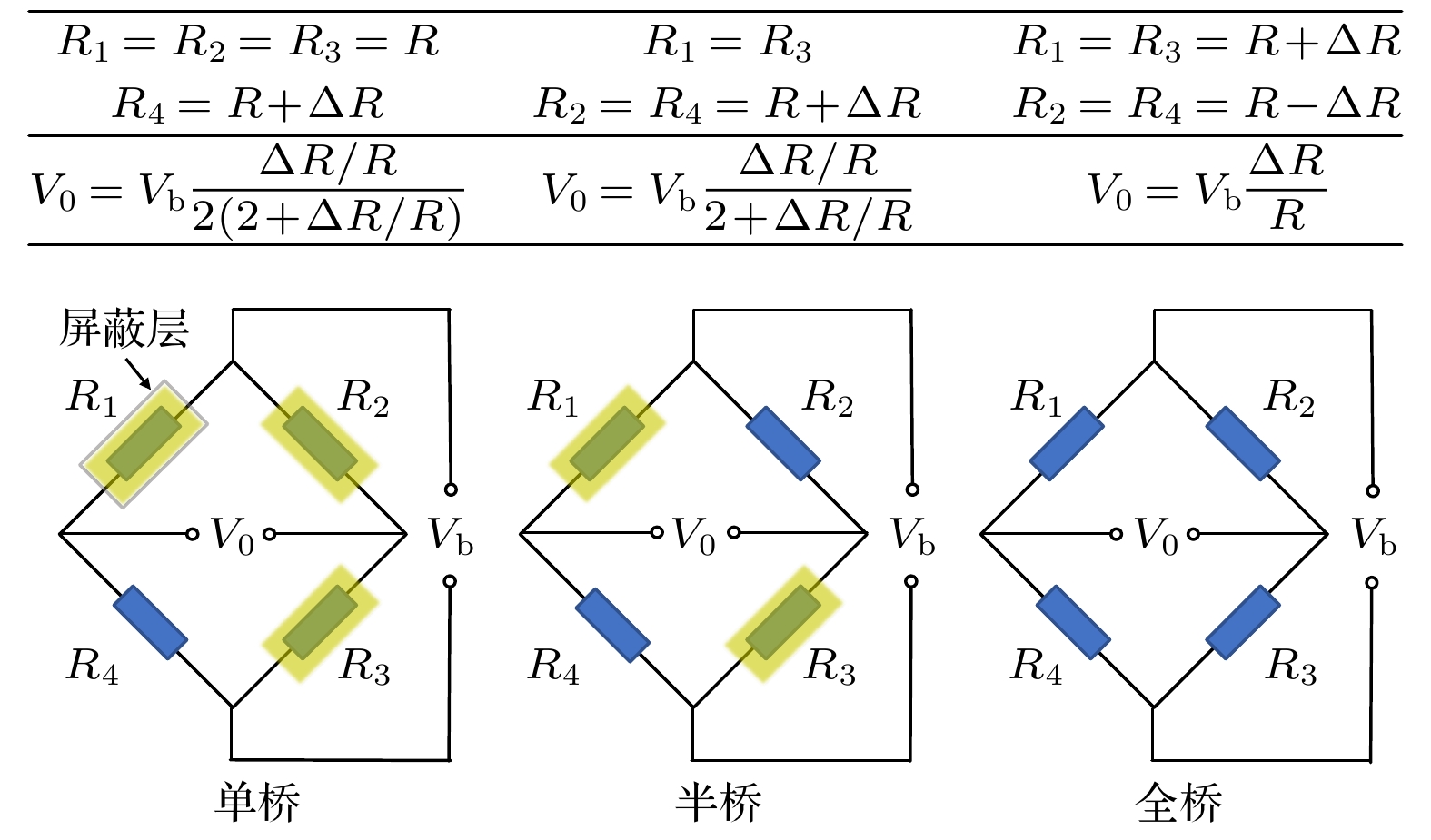
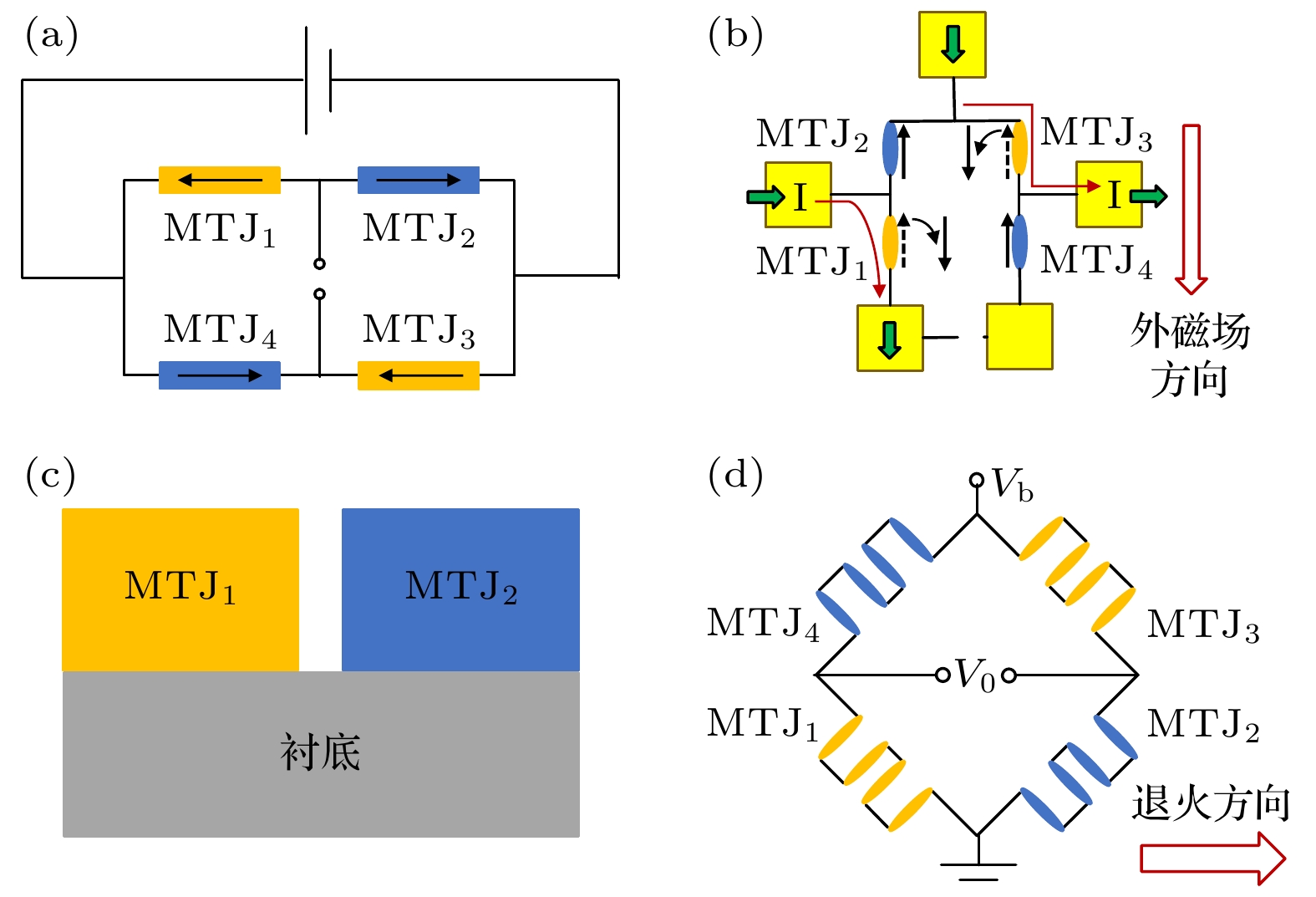
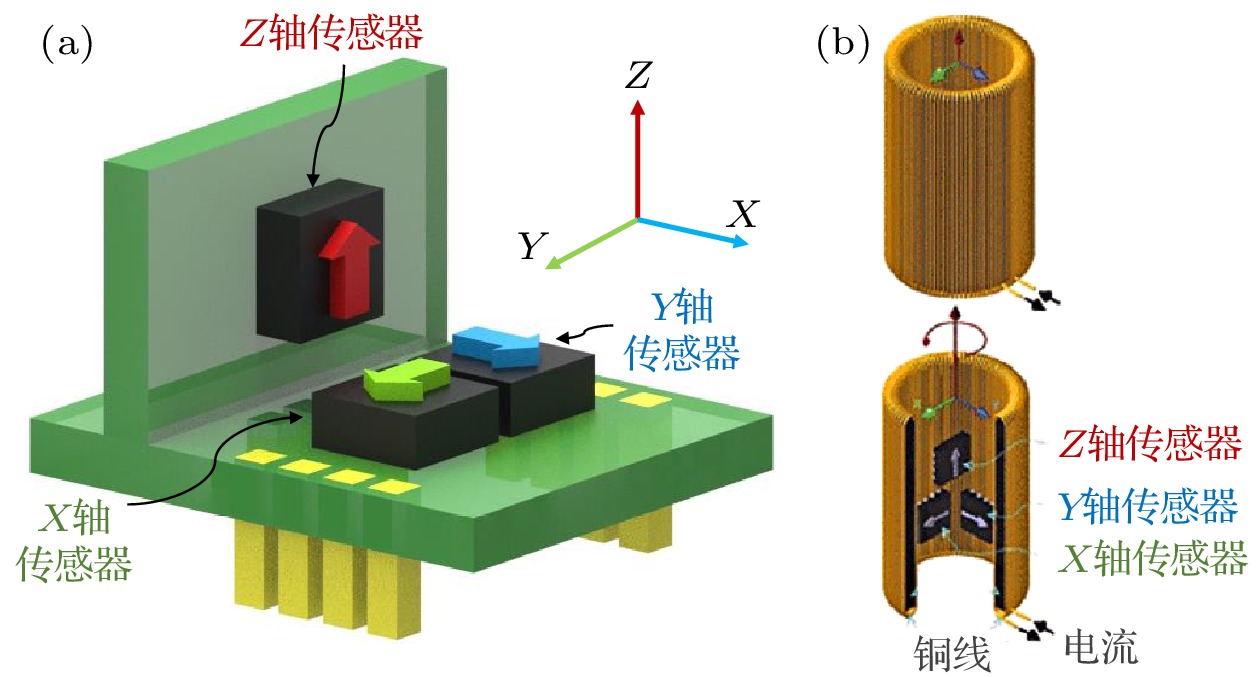
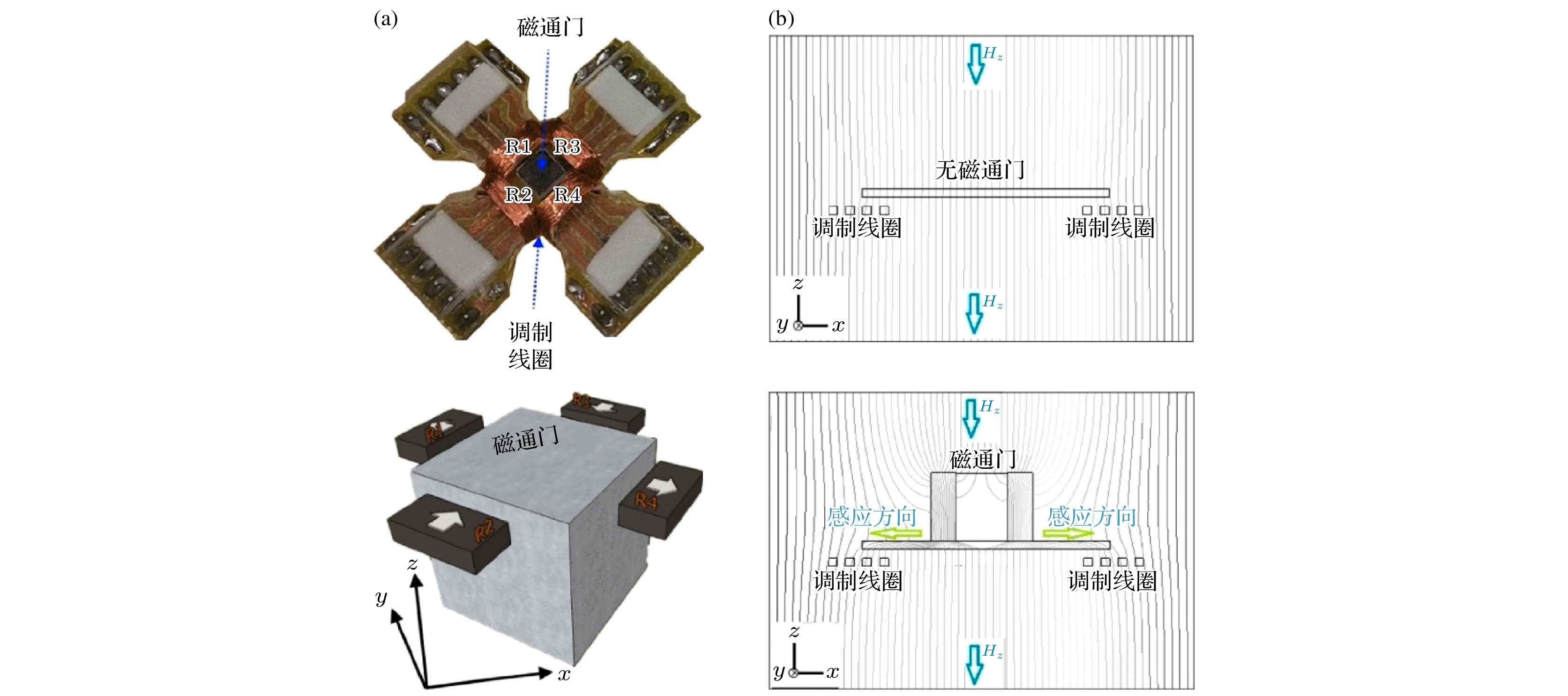
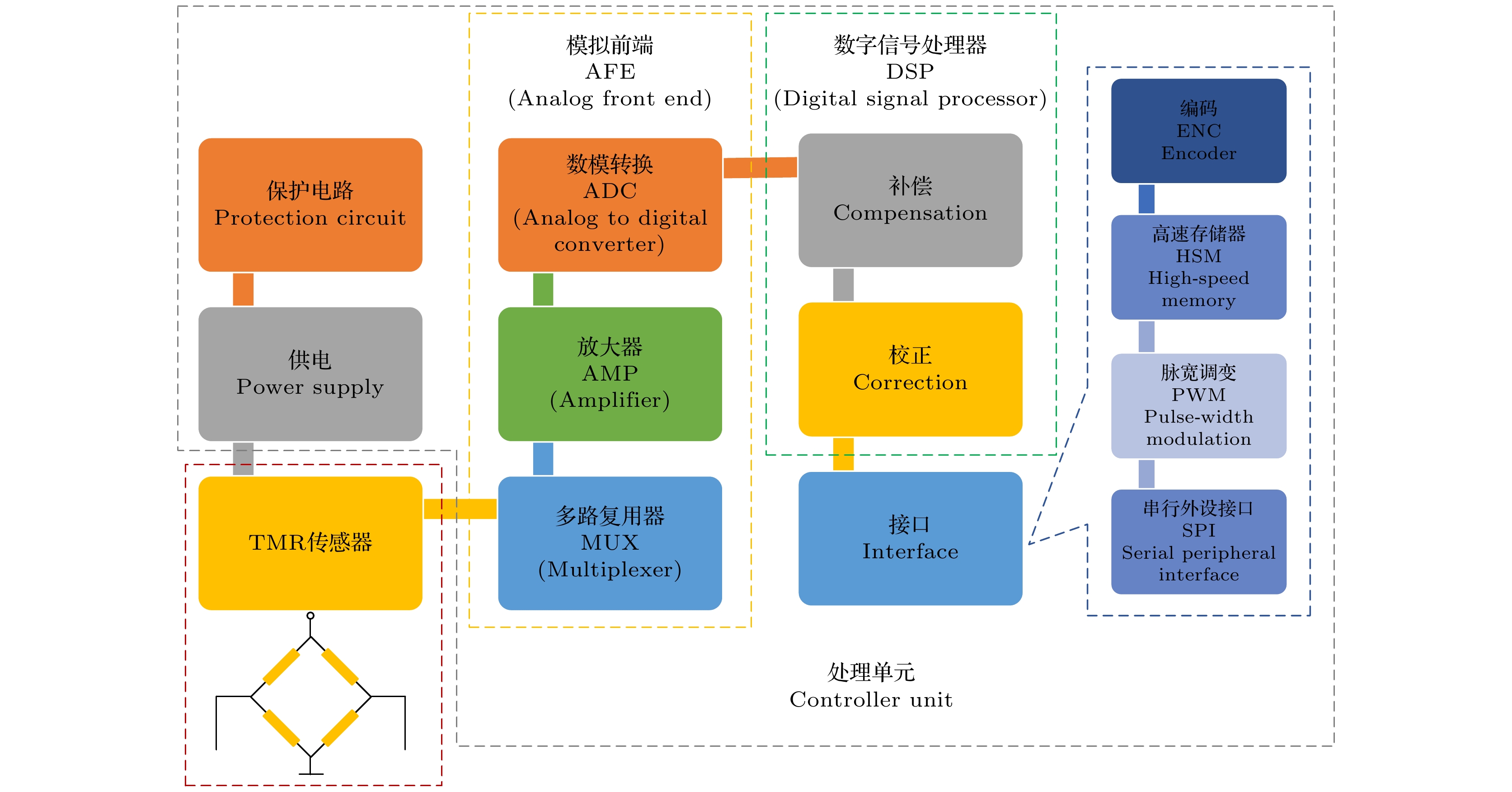
Sensors play an important role in Internet of Things (IoT) industry and account for a rapidly growing market share. Among them, the magnetic sensor based on tunneling magnetoresistance (TMR) effect possesses great potential applications in the fields of biomedical, navigation, positioning, current detection, and non-destructive testing due to its extremely high sensitivity, small device size and low power consumption. In this paper, we focus on the development of TMR sensor technology routes, covering a series of research advances from a sensor transducer to three-dimensional magnetic field detection, and then to the applications. Firstly, we recall the development history of TMR sensors, explain its working principle, and discuss the method to improve the output linearity of single magnetic tunnel junction. Next, we state the Wheatstone-bridge structure, which can inhibit temperature drift in detail and review several methods of fabricating the full bridge of TMR sensors. Furthermore, for the market demand of three-dimensional magnetic field detection, we summarize the methods of designing and fabricating three-dimensional sensing structure of the TMR sensor. At the same time, we list several optimization schemes of TMR sensor performance in terms of sensitivity and noise level. Finally, we discuss two types of emerging applications of TMR sensors in recent years. The TMR sensors can also be used in intelligence healthcare due to their ultra-high sensitivity. In addition, devices from the combination of spin materials and MEMS structure have attracted wide attention, especially, because of the large commercial market of microphones, spin-MEMS microphones utilized TMR techniques will be the next research hotspot in this interdisciplinary field.
-
Keywords:
- tunneling magnetoresistance sensors/
- linearization methods/
- sensor noise/
- intelligent applications
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] -
HALL AMR GMR TMR 物理效应 霍尔效应 各向异性磁阻效应 巨磁阻效应 隧穿磁阻效应 感应方向 垂直 面内 面内 面内/垂直 最大磁阻率/% — 2.0[23] 24[24] 604[10,11] 磁场探测范围/T 10–3—10 10–9—10–3 10–5—104 10–12—10 退火温度/℃ — — 220—280 280—340 磁场灵敏度/(mV·V–1·Oe–1) ~0.05 ~1 ~3 ~100 噪声指数/(nT·Hz–1/2)@1 Hz >100 0.1—10 1—10 0.01~10 功耗/mA 5—10 1—10 1—10 0.001—0.1 芯片尺寸/mm2 ~1×1 ~1×1 ~0.5×0.5 ~0.5×0.5  DownLoad:
CSV
DownLoad:
CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113]


 DownLoad:
DownLoad:
















Catalog
Metrics
- Abstract views:12191
- PDF Downloads:654
- Cited By:0