











-
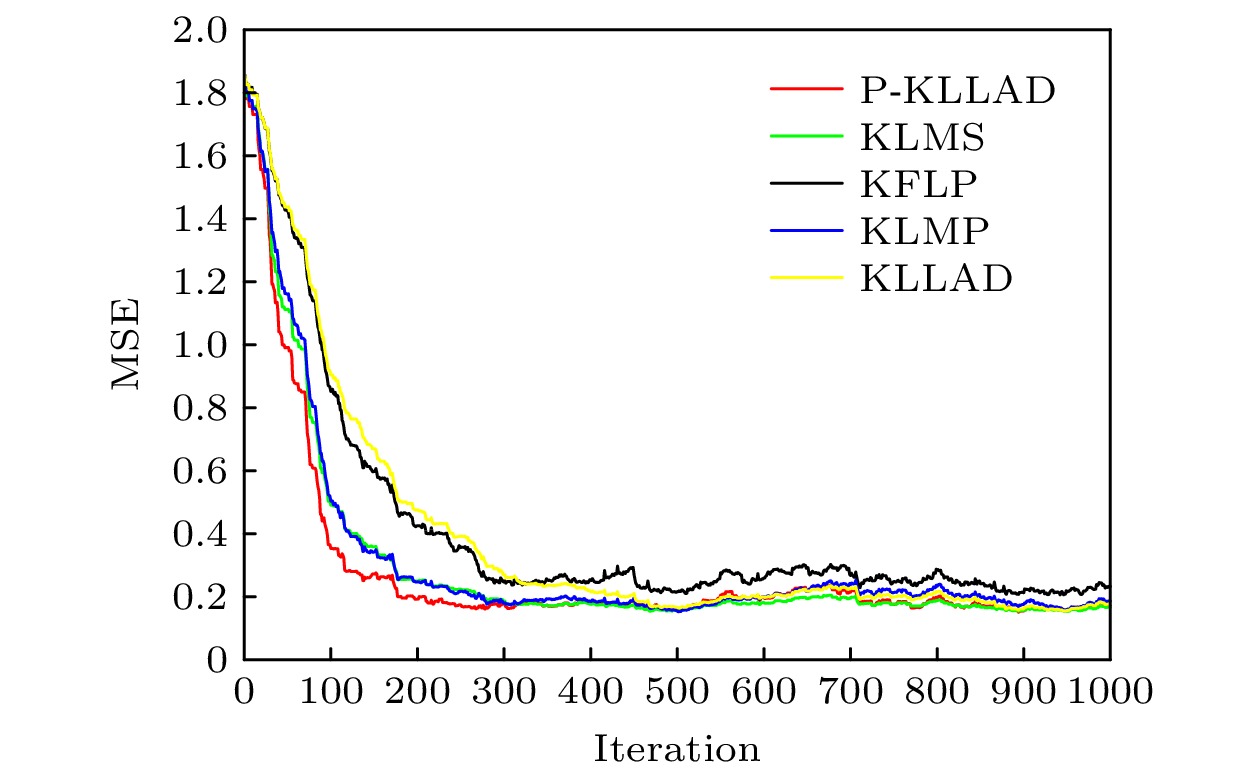
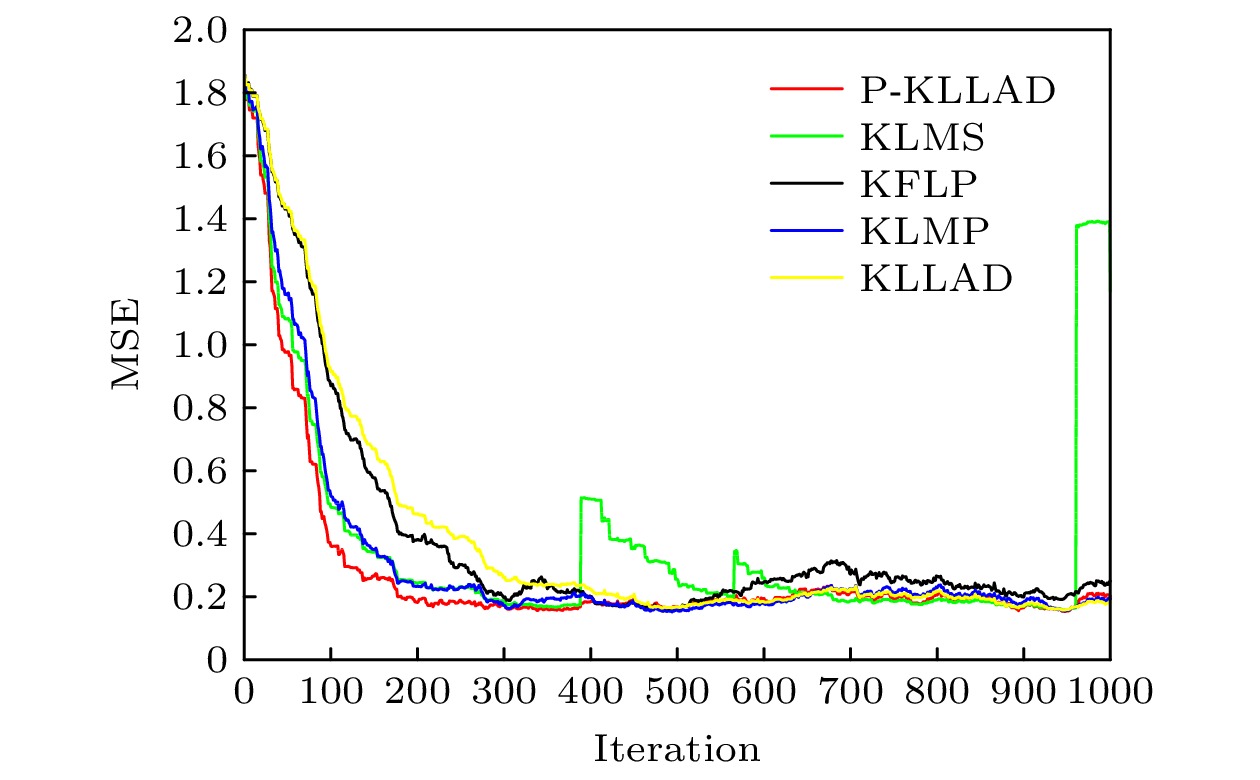
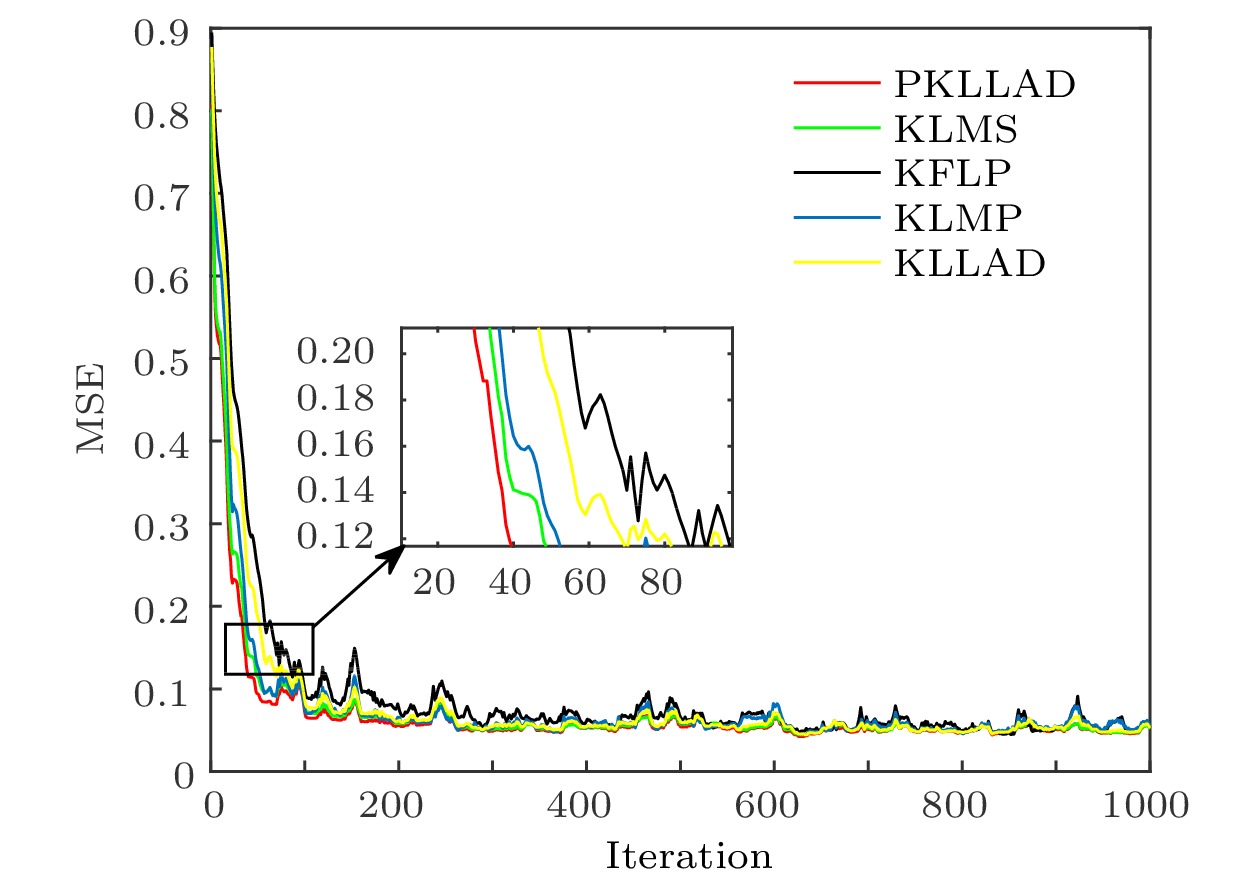
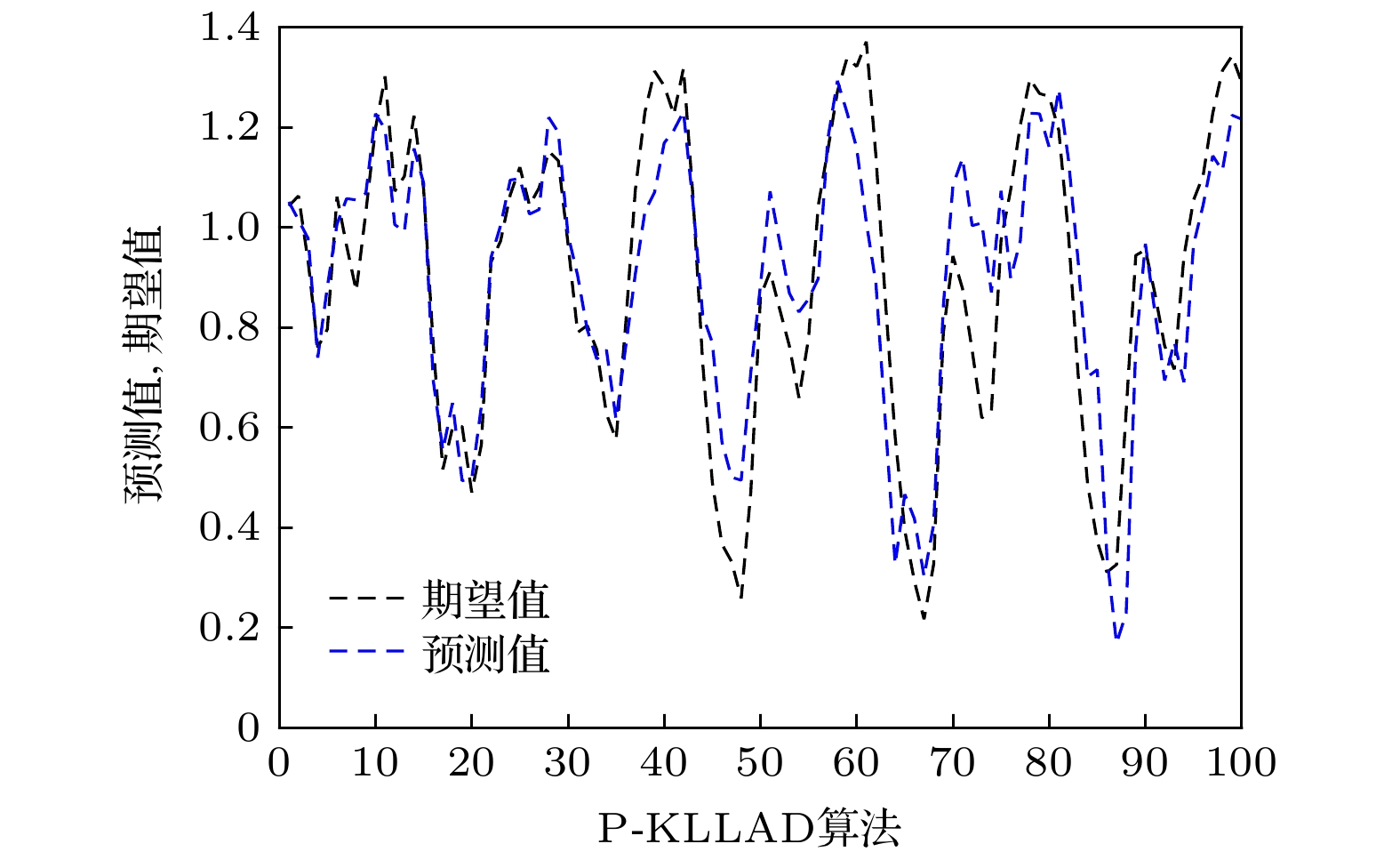
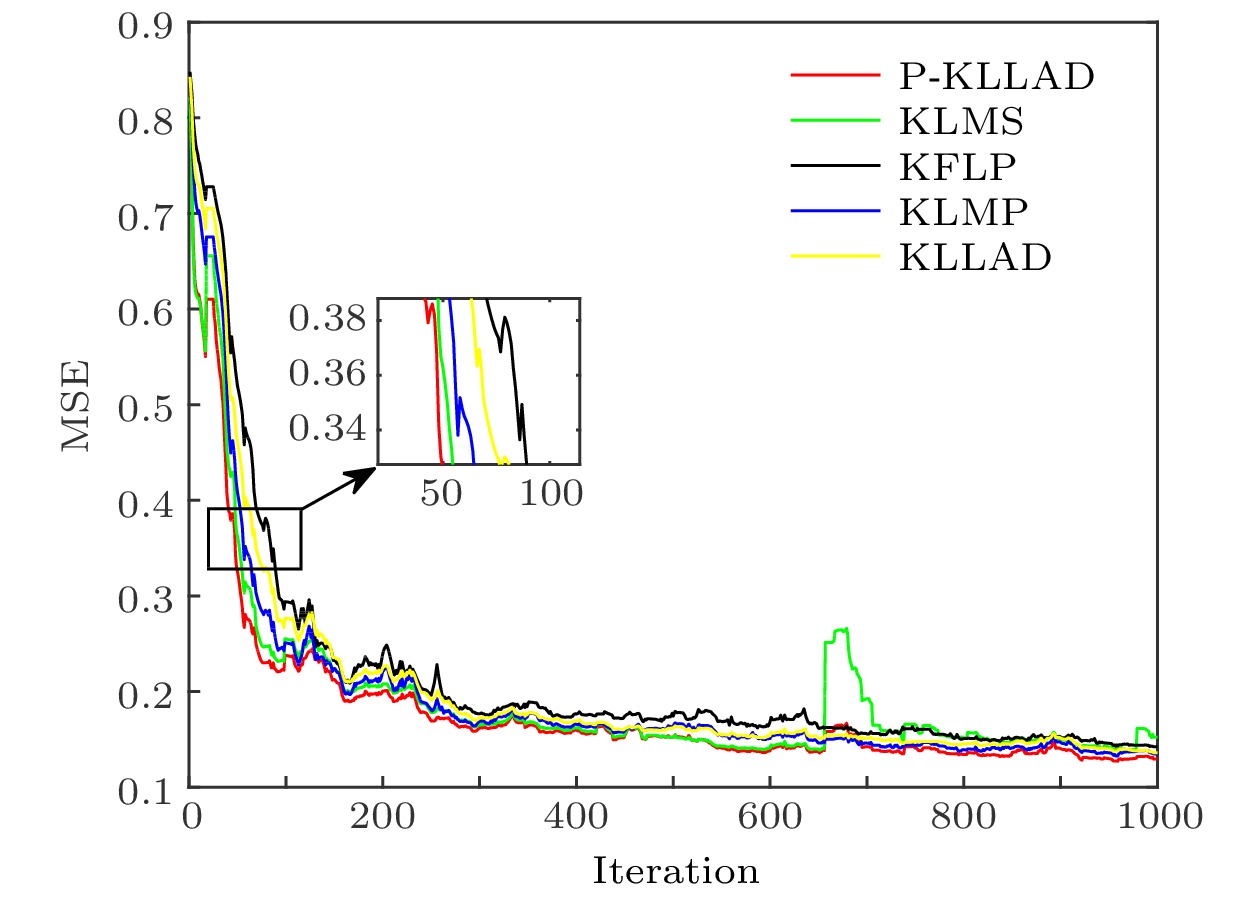
The kernel adaptive filtering is an efficient and nonlinear approximation method which is developed in reproducing kernel Hilbert space (RKHS). Kernel function is used to map input data from original space to RKHS space, thus solving nonlinear problems is efficient.Impulse noise and non-Gaussian noise exist in the real application environment, and the probability density distribution of these noise characteristics shows a relatively heavy trailing phenomenon in the statistical sense. α stable distribution can be used to model this kind of non-Gaussian noise well. The kernel least mean square(KLMS) algorithms usually perform well in Gaussian noise, but the mean square error criterion only captures the second-order statistics of the error signal, this type of algorithm is very sensitive to outliers, in other words, it lacks robustness in α stable distribution noise. The kernel least logarithm absolute difference(KLLAD) algorithm can deal with outliers well, but it has the problem of slow convergence.In order to further improve the convergence speed of nonlinear adaptive filtering algorithm in α stable distributed noise background, a new kernel least logarithm absolute difference algorithm based on p-norm (P-KLLAD) is presented in this paper. The algorithm combining least logarithm absolute difference algorithm and p norm, on the one hand, the least logarithm difference criteria is ensure the algorithm to have good robustness in α stable distribution noise environment, and on the other hand, add p norm on the absolute value of error.The steepness of the cost function is controlled by p norm and a posititive constant ɑ to improve the convergence speed of the algorithm.The computer simulation results of Mackey-Glass chaotic time series prediction and nonlinear system identification show that this algorithm improves the convergence speed with good robustness,and the convergence speed and robustness better than the kernel least mean square algorithm,the kernel fractional lower power algorithm, the kernel least logarithm absolute difference algorithm and the kernel least mean p-norm algorithm.
-
Keywords:
- αstable distributed noise/
- kernel adaptive filtering algorithm/
- minimum logarithm absolute difference criterion/
- pnorm
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] -
P-KLLAD算法 初始化: 选择合适的参数a,p和核宽h,
${a_1}(1) = \eta \dfrac{ {ap{ {\left| {d\left( 1 \right)} \right|}^{2 p - 1} } } }{ {1{ { + } }{ {\left| {d\left( 1 \right)} \right|}^p} } }{ {\rm{sgn} } } \left( {d\left( 1 \right)} \right)$更新: 每获得一对$ \left\{ {\boldsymbol u({ {i} }), d(i)} \right\} $, 计算输出值:
$ {f_{i - 1} }(\boldsymbol u({\rm{i} })) = \eta \displaystyle \sum\limits_{j = 1}^{i - 1} { {a_j}({\rm{i} } - 1)\kappa (\boldsymbol u({\rm{i} }), \boldsymbol u(j)} ) $计算误差: $ e(i) = d(i) - {f_{i - 1} }(\boldsymbol u({\rm{i} })) $ 更新系数: ${a_i}(i) = \eta \dfrac{ {ap{ {\left| {e\left( i \right)} \right|}^{2 p - 1} } } }{ {1{ { + } }{ {\left| {e\left( i \right)} \right|}^p} } }{ {\rm{sgn} } } \left( {e\left( i \right)} \right)$  DownLoad:
CSV
DownLoad:
CSV
算法名称 乘法或
除法加法或
减法指数
运算符号
函数分数幂
运算KLMS $ 3 i - 1 $ $ 2 i - 1 $ $ i - 1 $ — — KFLP $ 3 i - 2 $ $ 2 i - 1 $ $ i - 1 $ — — KLMP $ 3 i - 2 $ $ 2 i - 1 $ $ i - 1 $ 1 1 KLLAD $ 3 i + 1 $ $ 2 i - 1 $ $ i - 1 $ — — P-KLLAD $ 3 i + 1 $ $ 2 i - 1 $ $ i - 1 $ 1 2 DownLoad:
CSV
算法 MSE KLMS $ {{0}}{{.1952}} \pm {{0}}{{.1909}} $ KLMP $ {{0}}{{.1921}} \pm {{0}}{{.01339}} $ KFLP $ {{0}}{{.2311}} \pm {{0}}{{.02468}} $ KLLAD $ {{0}}{{.1794}} \pm {{0}}{{.0209}} $ P-KLLAD $ {{0}}{{.1792}} \pm {{0}}{{.0130}} $ DownLoad:
CSV
算法 MSE KLMS $ { {0} }{ {.0467} } \pm { {0} }{ {.0058} } $ KLMP $ { {0} }{ {.0485} } \pm { {0} }{ {.0086} } $ KFLP $ { {0} }{ {.0507} } \pm { {0} }{ {.0118} } $ KLLAD $ { {0} }{ {.0492} } \pm { {0} }{ {.0354} } $ P-KLLAD $ { {0} }{ {.0423} } \pm { {0} }{ {.0050} } $ DownLoad:
CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20]


 DownLoad:
DownLoad:








Catalog
Metrics
- Abstract views:3717
- PDF Downloads:53
- Cited By:0