











-
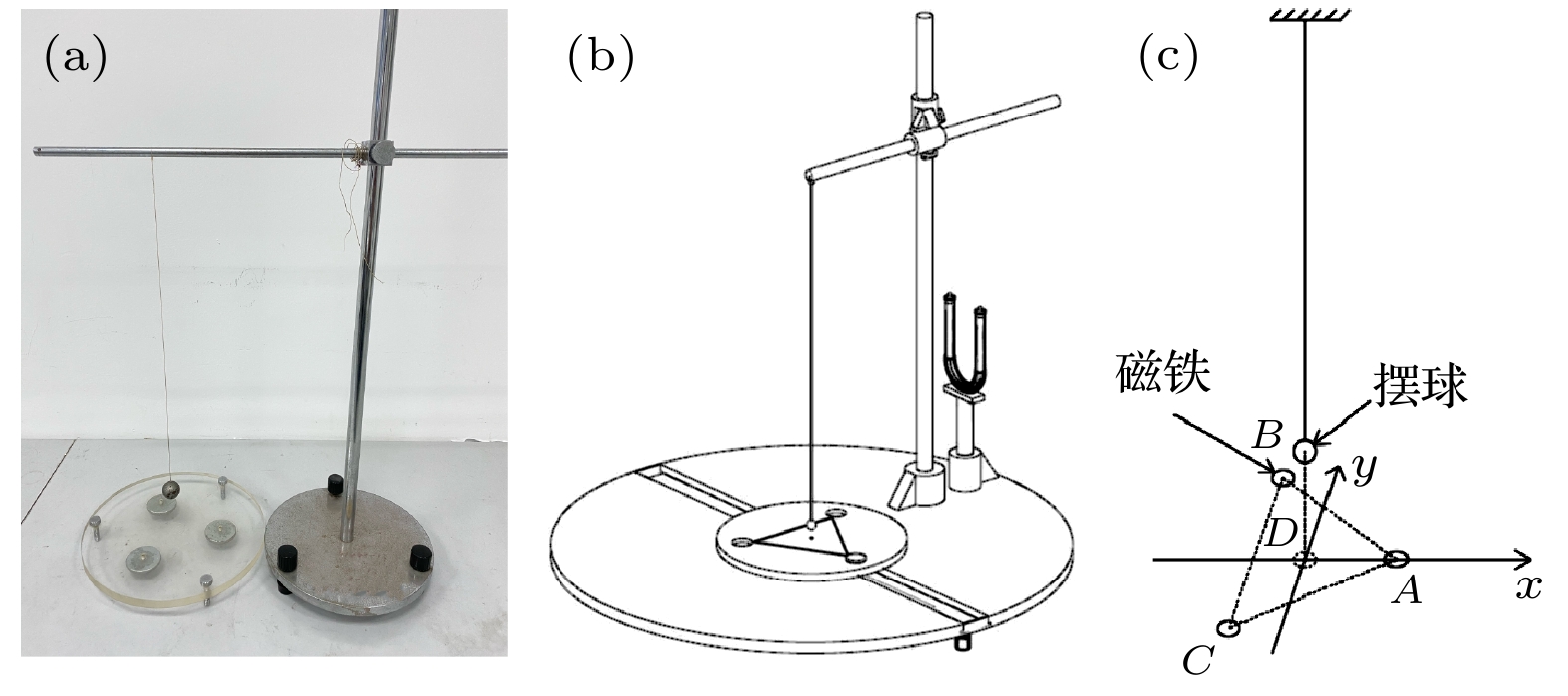
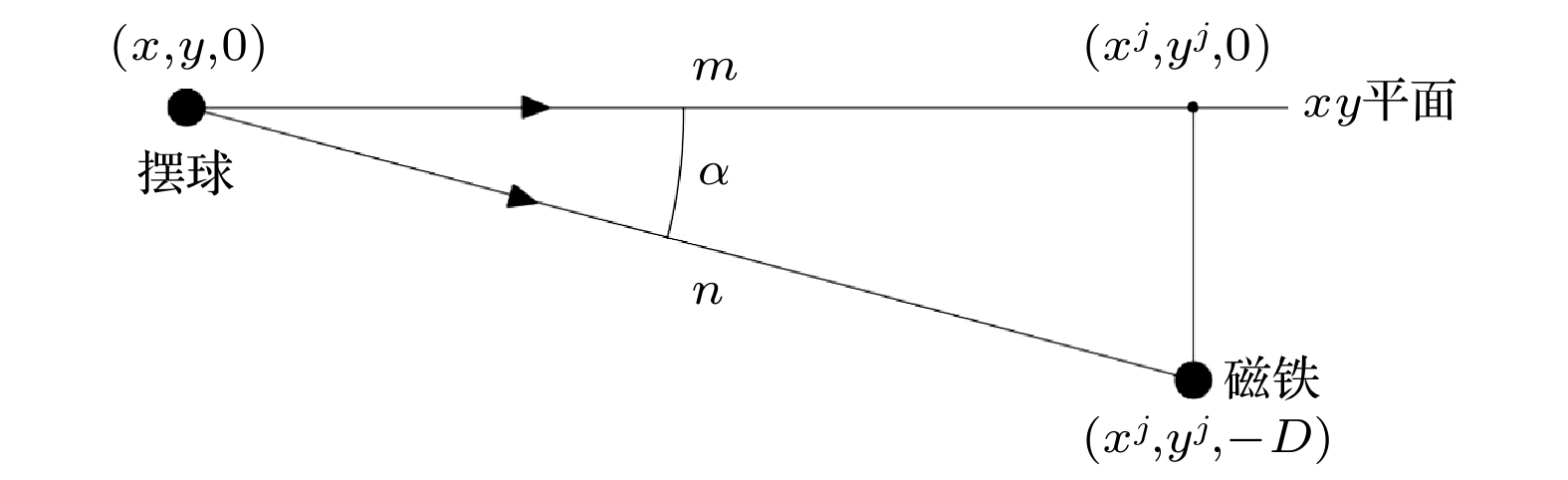
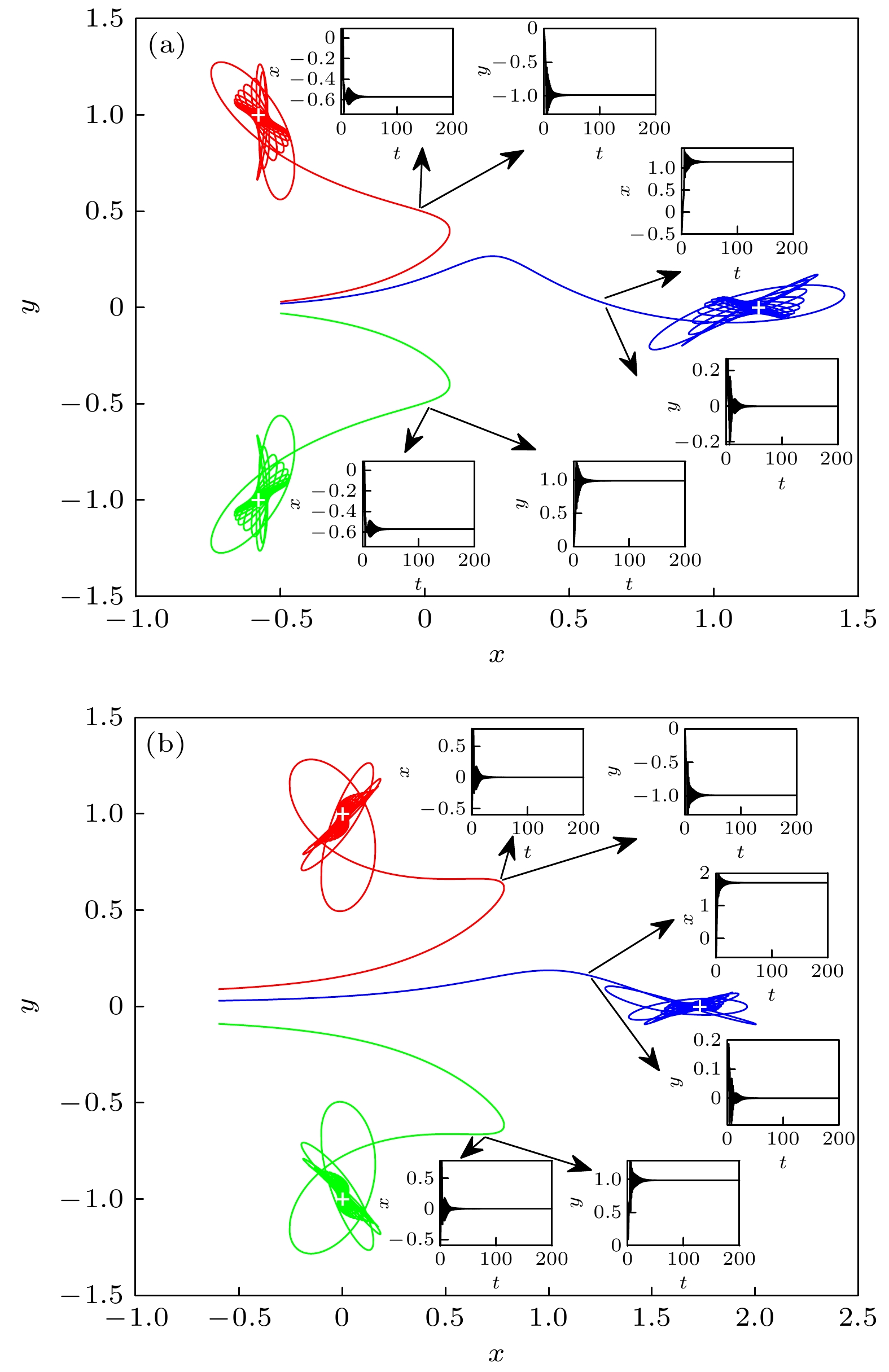
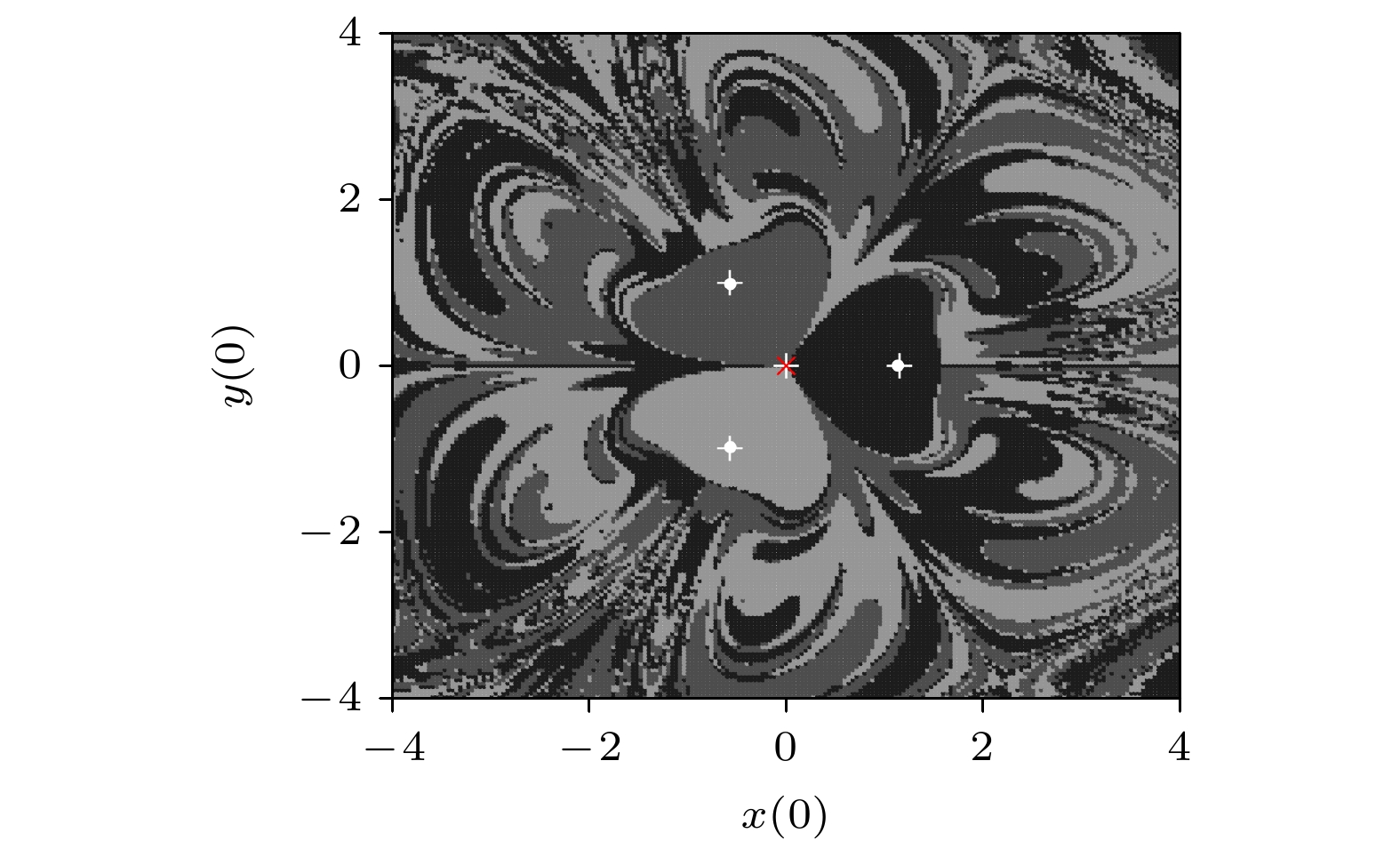
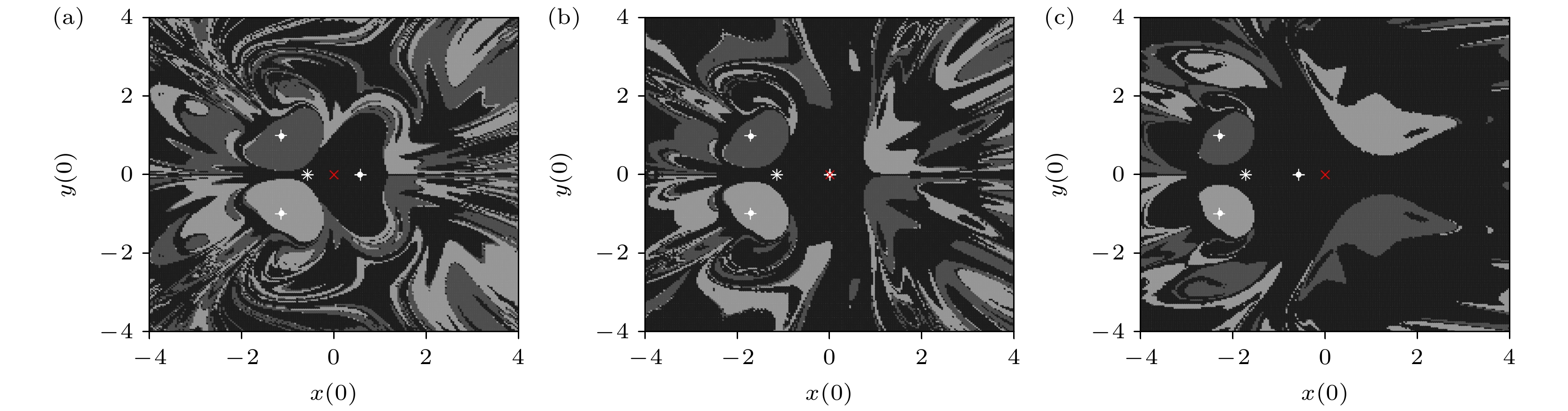
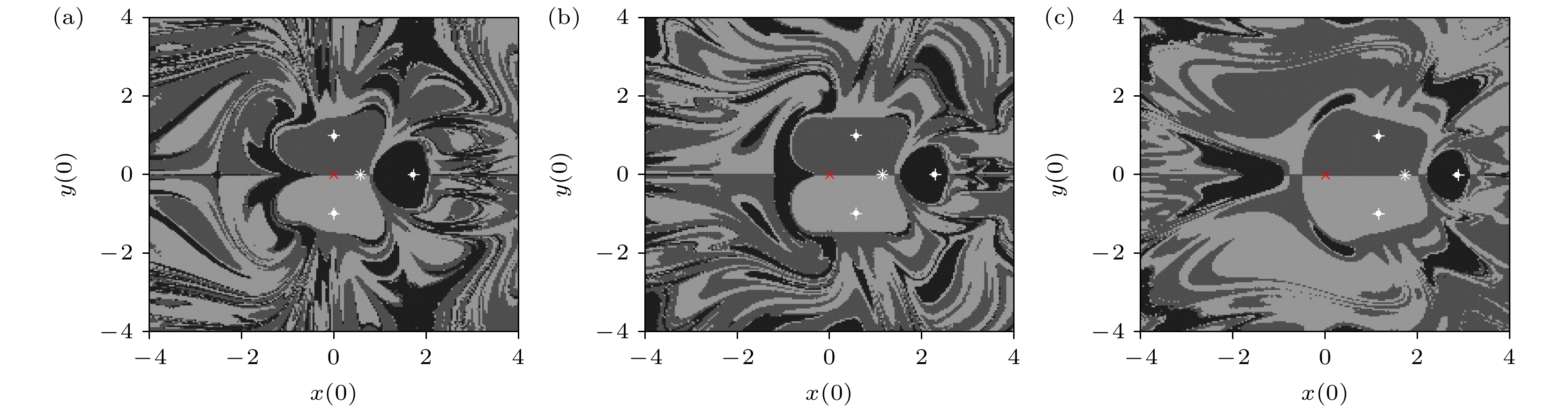
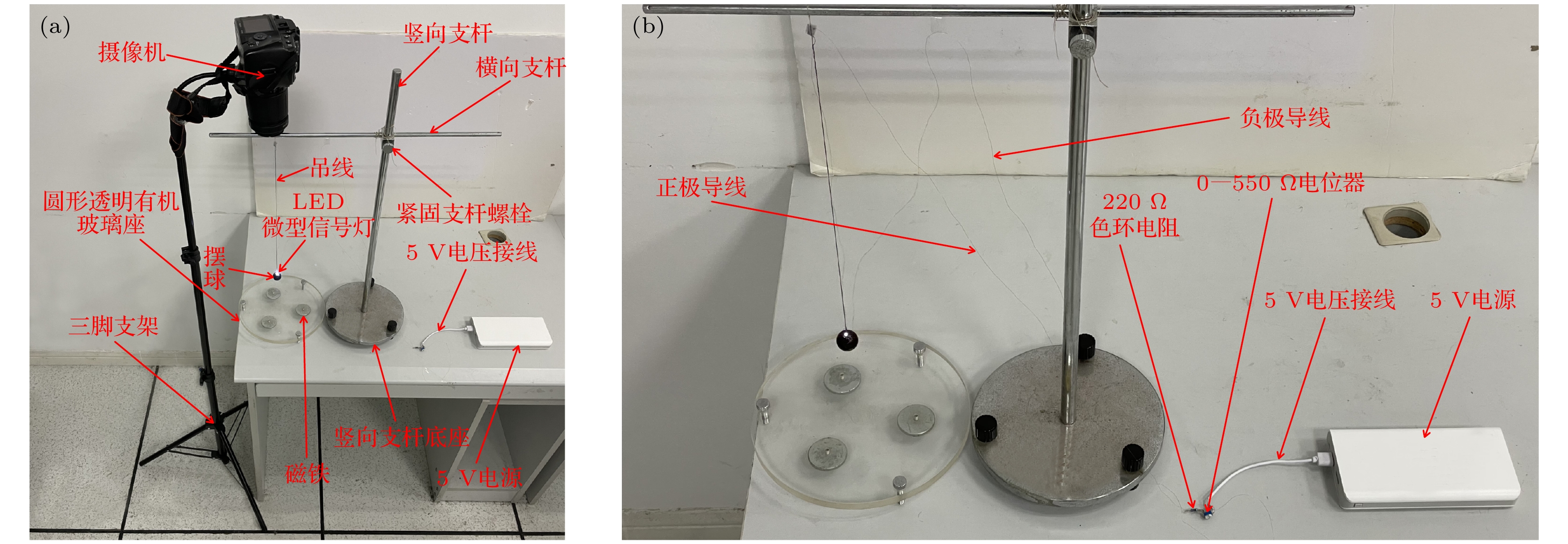
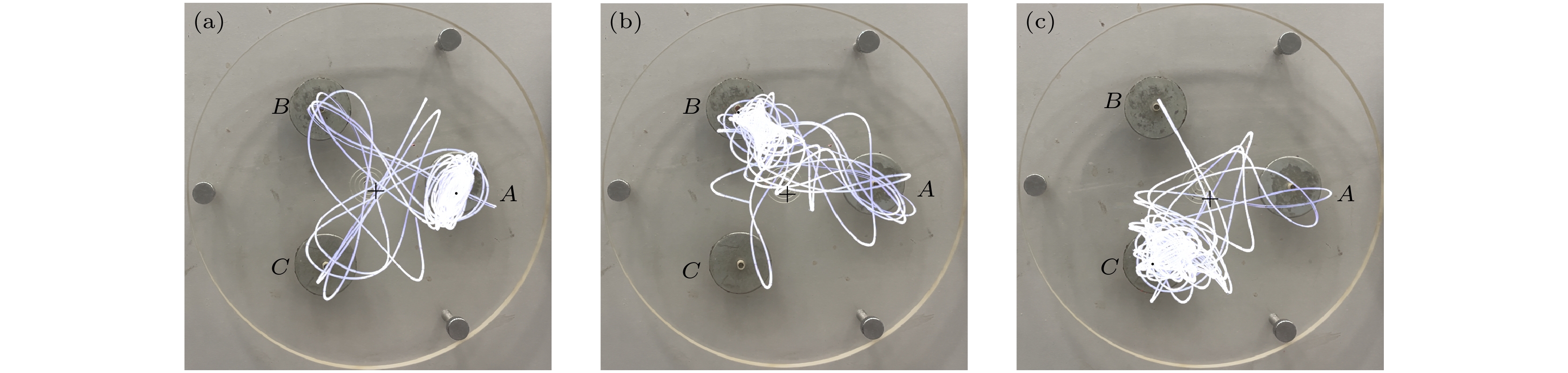
Based on the analysis of the global dynamic behavior of a typical magnetic pendulum with equilateral triangular arrangement, the initial sensitivity and its mechanism are studied. To begin with, assuming that the position of the magnet can be moved, the dynamical model of a typical magnetic pendulum is established via Newton’s second law. Furthermore, the number of equilibrium points under different magnet positions and their stability are analyzed. Upon this, the initial sensitivity phenomenon and the evolution of fractal basin of attraction of point attractors under different magnet positions are presented. Finally, the initial sensitivity phenomenon is verified experimentally. It is found that the coexistence of multiple attractors generally appears in this type of magnetic pendulum. The initial sensitivity can be attributed to the fractal basin of attraction of fixed point attractors, in which the positions of the fixed point attractors do not overlap with the projected positions of the center of the magnet on the plane where the magnet is located, but there is a slight deviation. When the position of the swing ball can be projected onto the centroids of three equilateral triangles corresponding to the magnets, the sizes of the three attractors’ attraction domains will be similar, whose boundaries are fractal and centrosymmetric, thus, the initial sensitivity is obvious. It also follows that the position of moving magnet affects the nature of basin of attraction directly, i.e., the magnet which is closest to the projection point of the balance position of the swing ball has a great influence on the swing ball: the domain of attraction of the attractor whose is the closest to the position will increase significantly, while the attractor domains of the other attractors will be eroded obviously. This paper has potential applications in designing the magnetic pendulum systems.
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] -
序号组别 移动距离 磁铁中心投影到$ xy $平面的位置 0 $ {d_o} = 0 $ $ (x_o^A, \;y_o^A) = (2\sqrt 3 /3, \;0) $, $ (x_o^B, \;y_o^B) = ( - \sqrt 3 /3, \;1) $, $ (x_o^C, \;y_o^C) = ( - \sqrt 3 /3, \; - 1) $ 1 $ {d_{{L_1}}} = - \sqrt 3 /3 $ $ (x_{{L_1}}^A, \;y_o^A) = (\sqrt 3 /3, \;0) $, $ (x_{{L_1}}^B, \;y_o^B) = ( - 2\sqrt 3 /3, \;1) $, $ (x_{{L_1}}^C, \;y_o^C) = ( - 2\sqrt 3 /3, \; - 1) $ 2 $ {d_{{L_2}}} = - 2\sqrt 3 /3 $ $ (x_{{L_2}}^A, \;y_o^A) = (0, \;0) $, $ (x_{{L_2}}^B, \;y_o^B) = ( - \sqrt 3, \;1) $, $ (x_{{L_2}}^C, \;y_o^C) = ( - \sqrt 3, \; - 1) $ 3 $ {d_{{L_3}}} = - \sqrt 3 $ $ (x_{{L_3}}^A, \;y_o^A) = ( - \sqrt 3 /3, \;0) $, $ (x_{{L_3}}^B, \;y_o^B) = ( - 4\sqrt 3 /3, \;1) $, $ (x_{{L_3}}^C, \;y_o^C) = ( - 4\sqrt 3 /3, \; - 1) $ 4 $ {d_{{R_1}}} = \sqrt 3 /3 $ $ (x_{{R_1}}^A, \;y_o^A) = (\sqrt 3, \;0) $, $ (x_{{R_1}}^B, \;y_o^B) = (0, \;1) $, $ (x_{{R_1}}^C, \;y_o^C) = (0, \; - 1) $ 5 $ {d_{{R_2}}} = 2\sqrt 3 /3 $ $ (x_{{R_2}}^A, \;y_o^A) = (4\sqrt 3 /3, \;0) $, $ (x_{{R_2}}^A, \;y_o^B) = (\sqrt 3 /3, \;1) $, $ (x_{{R_2}}^C, \;y_o^C) = (\sqrt 3 /3, \; - 1) $ 6 $ {d_{{R_3}}} = \sqrt 3 $ $ (x_{{R_3}}^A, \;y_o^A) = (5\sqrt 3 /3, \;0) $, $ (x_{{R_3}}^B, \;y_o^B) = (2\sqrt 3 /3, \;1) $, $ (x_{{R_3}}^C, \;y_o^C) = (2\sqrt 3 /3, \; - 1) $  DownLoad:
CSV
DownLoad:
CSV
组别序号 移动距离 平衡点位置 0 $ {d_o} = 0 $ $ (\tilde x_o^1, \;\tilde y_o^1) = (1.139, \;0) $, $ (\tilde x_o^2, \;\tilde y_o^2) = ( - 0.570, \;0.986) $, $ (\tilde x_o^3, \;\tilde y_o^3) = ( - 0.570, \; - 0.986) $, $ (\tilde x_o^4, \;\tilde y_o^4) = (0.054, \;0.094) $, $ (\tilde x_o^5, \;\tilde y_o^5) = (0.054, \; - 0.094) $, $ (\tilde x_o^6, \;\tilde y_o^6) = ( - 0.108, \;0) $ 1 $ {d_{{L_1}}} = - \sqrt 3 /3 $ $ (\tilde x_{{L_1}}^1, \;\tilde y_{{L_1}}^1) = (0.566, \;0) $, $ (\tilde x_{{L_1}}^2, \;\tilde y_{{L_1}}^2) = ( - 1.142, \;0.986) $, $ (\tilde x_{{L_1}}^3, \;\tilde y_{{L_1}}^3) = ( - 1.142, \; - 0.986) $, $ (\tilde x_{{L_1}}^4, \;\tilde y_{{L_1}}^4) = ( - 0.521, \;0.343) $, $ (\tilde x_{{L_1}}^5, \;\tilde y_{{L_1}}^5) = ( - 0.521, \; - 0.343) $ 2 $ {d_{{L_2}}} = - 2\sqrt 3 /3 $ $ (\tilde x_{{L_2}}^1, \;\tilde y_{{L_2}}^1) = ( - 0.007, \;0) $, $ (\tilde x_{{L_2}}^2, \;\tilde y_{{L_2}}^2) = ( - 1.715, \;0.986) $, $ (\tilde x_{{L_2}}^3, \;\tilde y_{{L_2}}^3) = ( - 1.715, \; - 0.986) $, $ (\tilde x_{{L_2}}^4, \;\tilde y_{{L_2}}^4) = ( - 1.105, \;0.475) $, $ (\tilde x_{{L_2}}^5, \;\tilde y_{{L_2}}^5) = ( - 1.105, \; - 0.475) $ 3 $ {d_{{L_3}}} = - \sqrt 3 $ $ (\tilde x_{{L_3}}^1, \;\tilde y_{{L_3}}^1) = ( - 0.579, \;0) $, $ (\tilde x_{{L_3}}^2, \;\tilde y_{{L_3}}^2) = ( - 2.288, \;0.986) $, $ (\tilde x_{{L_3}}^3, \;\tilde y_{{L_3}}^3) = ( - 2.288, \; - 0.986) $, $ (\tilde x_{{L_3}}^4, \;\tilde y_{{L_3}}^4) = ( - 1.697, \;0.573) $, $ (\tilde x_{{L_3}}^5, \;\tilde y_{{L_3}}^5) = ( - 1.697, \; - 0.573) $ 4 $ {d_{{R_1}}} = \sqrt 3 /3 $ $ (\tilde x_{{R_1}}^1, \;\tilde y_{{R_1}}^1) = (1.712, \;0) $, $ (\tilde x_{{R_1}}^2, \;\tilde y_{{R_1}}^2) = (0.003, \;0.986) $, $ (\tilde x_{{R_1}}^3, \;\tilde y_{{R_1}}^3) = (0.003, \; - 0.986) $, $ (\tilde x_{{R_1}}^4, \;\tilde y_{{R_1}}^4) = (0.847, \;0) $, $ (\tilde x_{{R_1}}^5, \;\tilde y_{{R_1}}^5) = (0.177, \;0) $ 5 $ {d_{{R_2}}} = 2\sqrt 3 /3 $ $ (\tilde x_{{R_2}}^1, \;\tilde y_{{R_2}}^1) = (2.284, \;0) $, $ (\tilde x_{{R_2}}^2, \;\tilde y_{{R_2}}^2) = (0.576, \;0.986) $, $ (\tilde x_{{R_2}}^3, \;\tilde y_{{R_2}}^3) = (0.576, \; - 0.986) $, $ (\tilde x_{{R_2}}^4, \;\tilde y_{{R_2}}^4) = (1.541, \;0) $, $ (\tilde x_{{R_2}}^5, \;\tilde y_{{R_2}}^5) = (0.595, \;0) $ 6 $ {d_{{R_3}}} = \sqrt 3 $ $ (\tilde x_{{R_3}}^1, \;\tilde y_{{R_3}}^1) = (2.857, \;0) $, $ (\tilde x_{{R_3}}^2, \;\tilde y_{{R_3}}^2) = (1.149, \;0.986) $, $ (\tilde x_{{R_3}}^3, \;\tilde y_{{R_3}}^3) = (1.149, \; - 0.986) $, $ (\tilde x_{{R_3}}^4, \;\tilde y_{{R_3}}^4) = (2.200, \;0) $, $ (\tilde x_{{R_3}}^5, \;\tilde y_{{R_3}}^5) = (1.025, \;0) $ DownLoad:
CSV
序号组别 平衡点位置 平衡点特征值 特征子空间维数 稳定性 0 $ (\tilde x_o^1, \;\tilde y_o^1) $ $\lambda _{1, \;2}^1 = \pm 2.61{\rm{i} }$, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_o^2, \;\tilde y_o^2) $ $ \lambda _{1, \;2}^2 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 1.07{\rm{i}} $ 4 稳定 $ (\tilde x_o^3, \;\tilde y_o^3) $ $ \lambda _{1, \;2}^3 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 1.07{\rm{i}} $ 4 稳定 1 $ (\tilde x_{{L_1}}^1, \;\tilde y_{{L_1}}^1) $ $ \lambda _{1, \;2}^1 = \pm 6.28{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_1}}^2, \;\tilde y_{{L_1}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.53{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.87{\rm{i}} $ 4 稳定 $ (\tilde x_{{L_1}}^3, \;\tilde y_{{L_1}}^3) $ $ \lambda _{1, \;2}^3 = \pm 1.53{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 0.87{\rm{i}} $ 4 稳定 2 $ (\tilde x_{{L_2}}^1, \;\tilde y_{{L_2}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.52{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_2}}^2, \;\tilde y_{{L_2}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.09{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.49{\rm{i}} $ 4 稳定 $ (\tilde x_{{L_2}}^3, \;\tilde y_{{L_2}}^3) $ $\lambda _{1, \;2}^3 = \pm 1.09{\rm{i} }$, $\lambda _{3, \;4}^3 = \pm 0.49{\rm{i} }$ 4 稳定 3 $ (\tilde x_{{L_3}}^1, \tilde y_{{L_3}}^1) $ $\lambda _{1, \;2}^1 = \pm 6.39{\rm{i} }$, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_3}}^2, \tilde y_{{L_3}}^2) $ $\lambda _{1, \;2}^2 = \pm 0.80{\rm{i} }$, $\lambda _{3, \;4}^2 = \pm 0.28{\rm{i} }$ 4 稳定 $ (\tilde x_{{L_3}}^3, \tilde y_{{L_3}}^3) $ $\lambda _{1, \;2}^3 = \pm 0.80{\rm{i} }$, $\lambda _{3, \;4}^3 = \pm 0.28{\rm{i} }$ 4 稳定 4 $ (\tilde x_{{R_1}}^1, \tilde y_{{R_1}}^1) $ $ \lambda _{1, \;2}^1 = \pm 1.47{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_1}}^2, \tilde y_{{R_1}}^2) $ $ \lambda _{1, \;2}^2 = \pm 3.18{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.01{\rm{i}} $ 4 稳定 $ (\tilde x_{{R_1}}^3, \tilde y_{{R_1}}^3) $ $\lambda _{1, \;2}^3 = \pm 3.18{\rm{i} }$, $ \lambda _{3, \;4}^3 = \pm 0.01{\rm{i}} $ 4 稳定 5 $ (\tilde x_{{R_2}}^1, \;\tilde y_{{R_2}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.96{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_2}}^2, \;\tilde y_{{R_2}}^2) $ $ \lambda _{1, \;2}^2 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 1.08{\rm{i}} $ 4 稳定 $ (\tilde x_{{R_2}}^3, \;\tilde y_{{R_2}}^3) $ $ \lambda _{1, \;2}^3 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 1.08{\rm{i}} $ 4 稳定 6 $ (\tilde x_{{R_3}}^1, \;\tilde y_{{R_3}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.69{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_3}}^2, \;\tilde y_{{R_3}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.54{\rm{i}} $, $\lambda _{3, \;4}^2 = \pm 0.87{\rm{i} }$ 4 稳定 $ (\tilde x_{{R_3}}^3, \;\tilde y_{{R_3}}^3) $ $ \lambda _{1, \;2}^3 = \pm 1.54{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 0.87{\rm{i}} $ 4 稳定 DownLoad:
CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26]


 DownLoad:
DownLoad:







Catalog
Metrics
- Abstract views:4719
- PDF Downloads:95
- Cited By:0