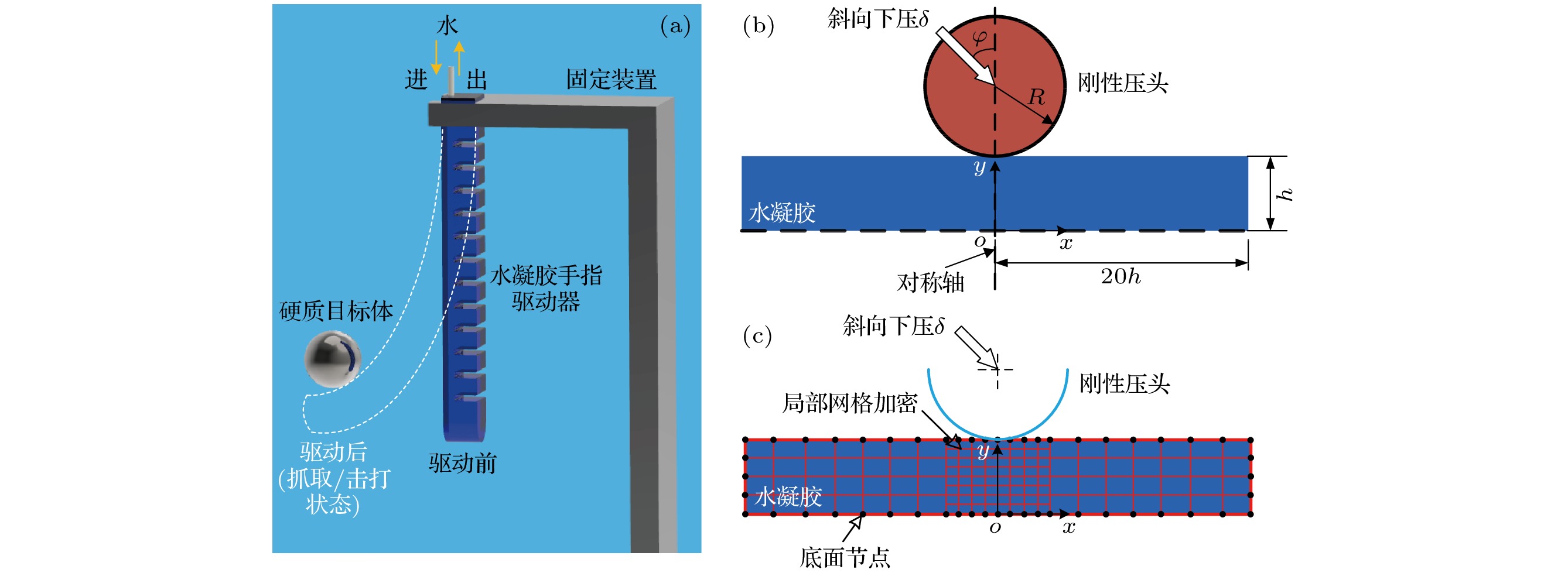
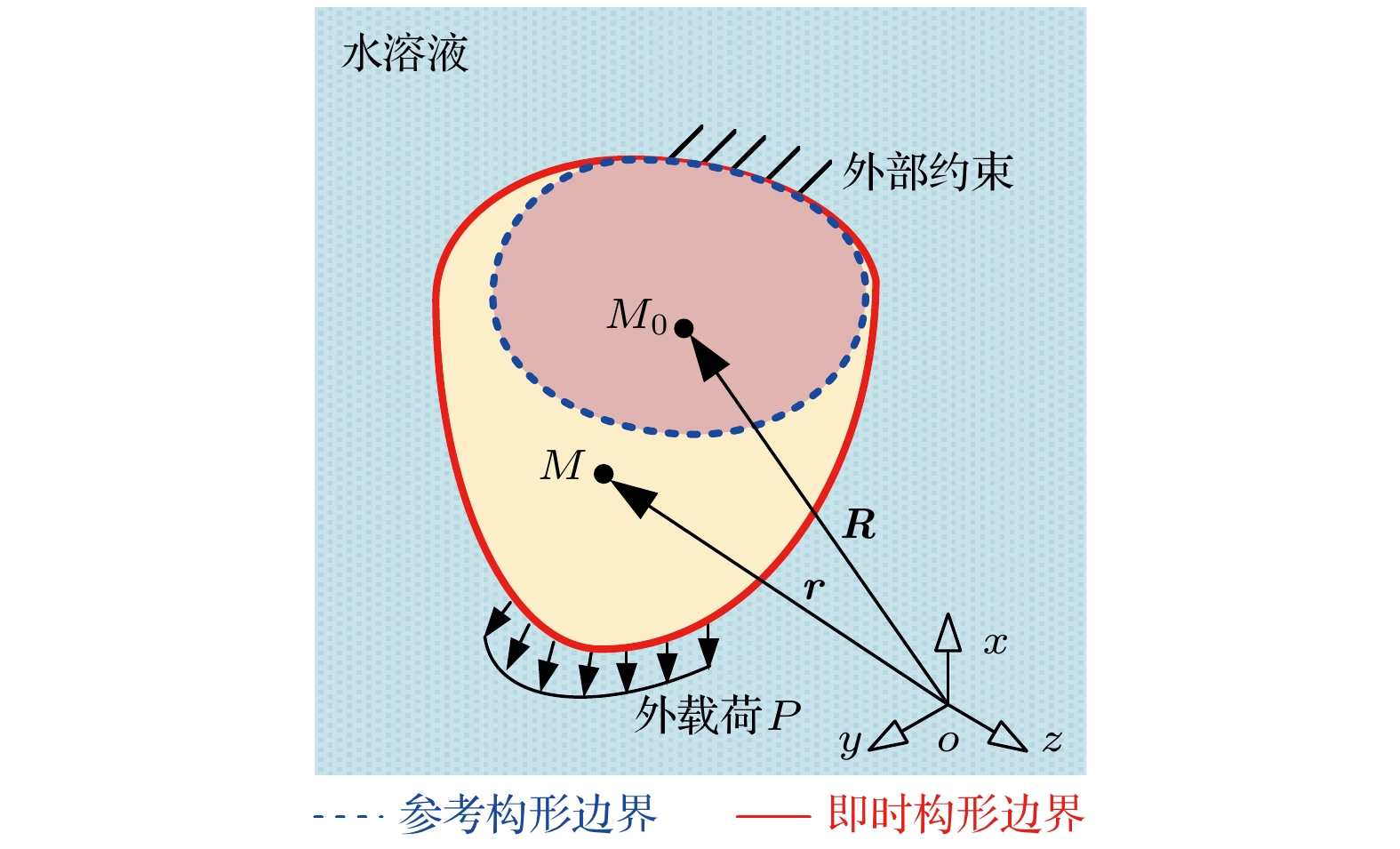
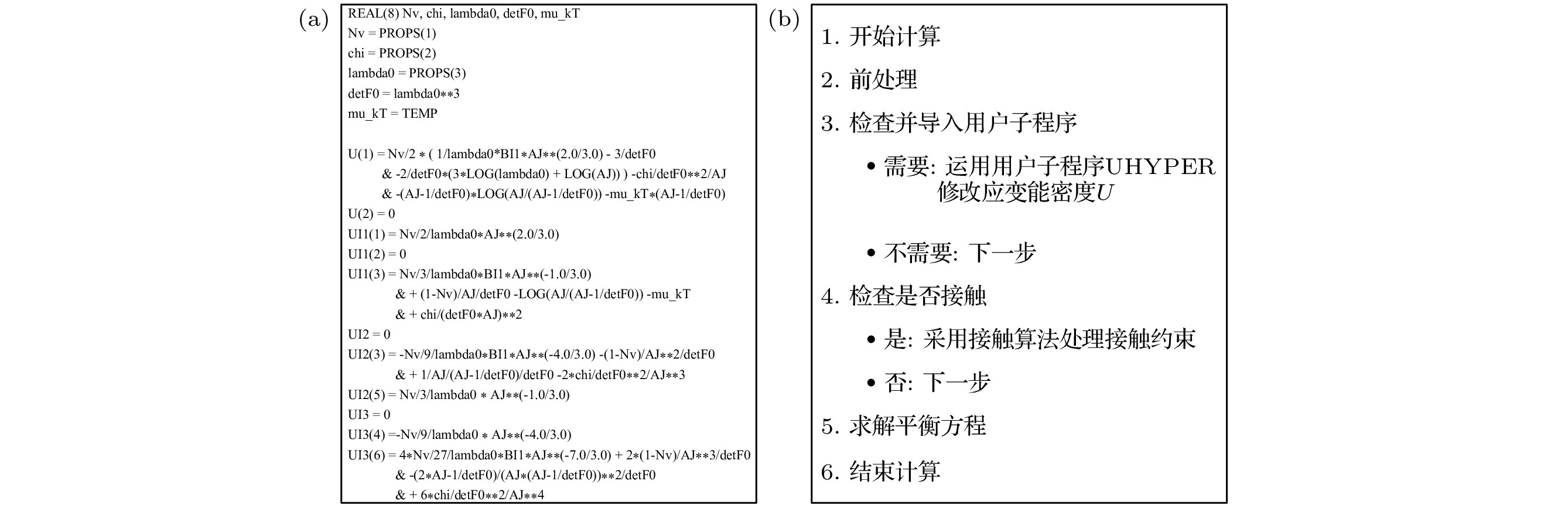
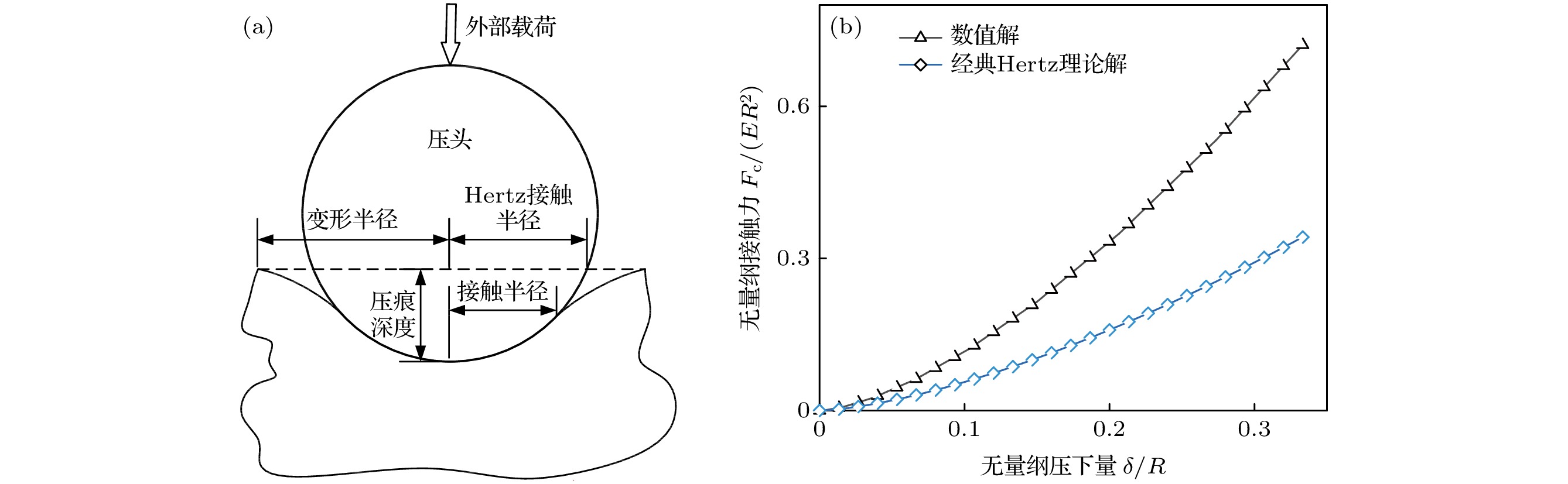
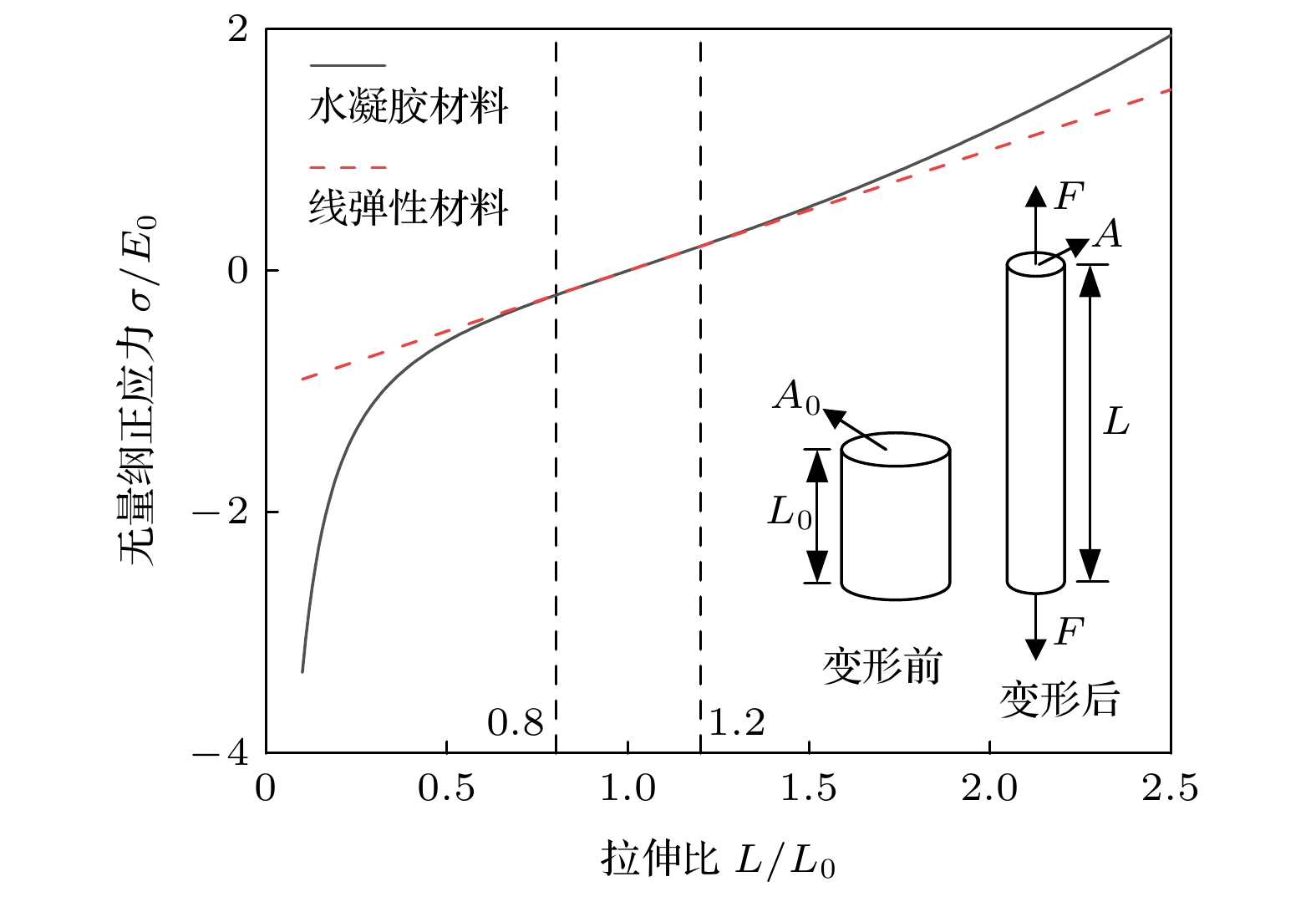
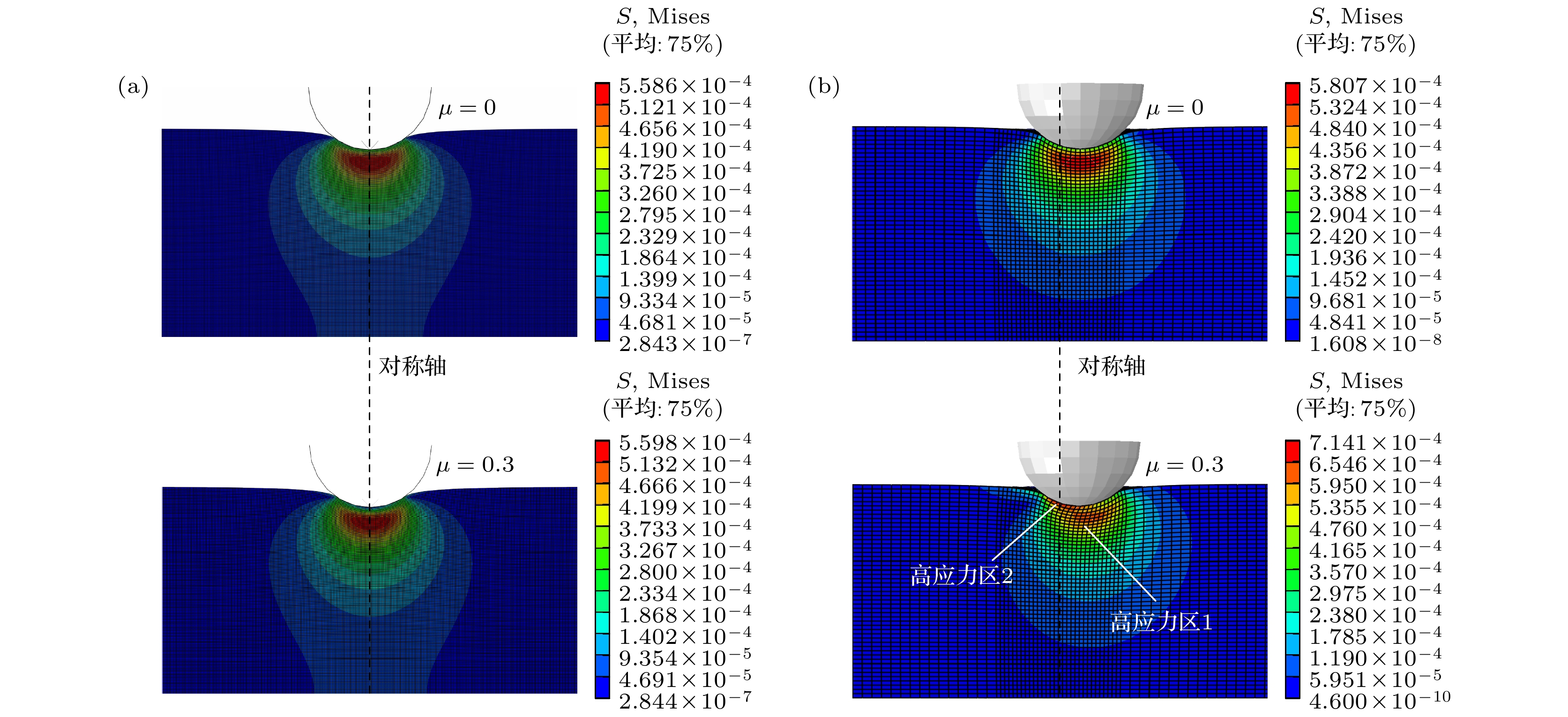
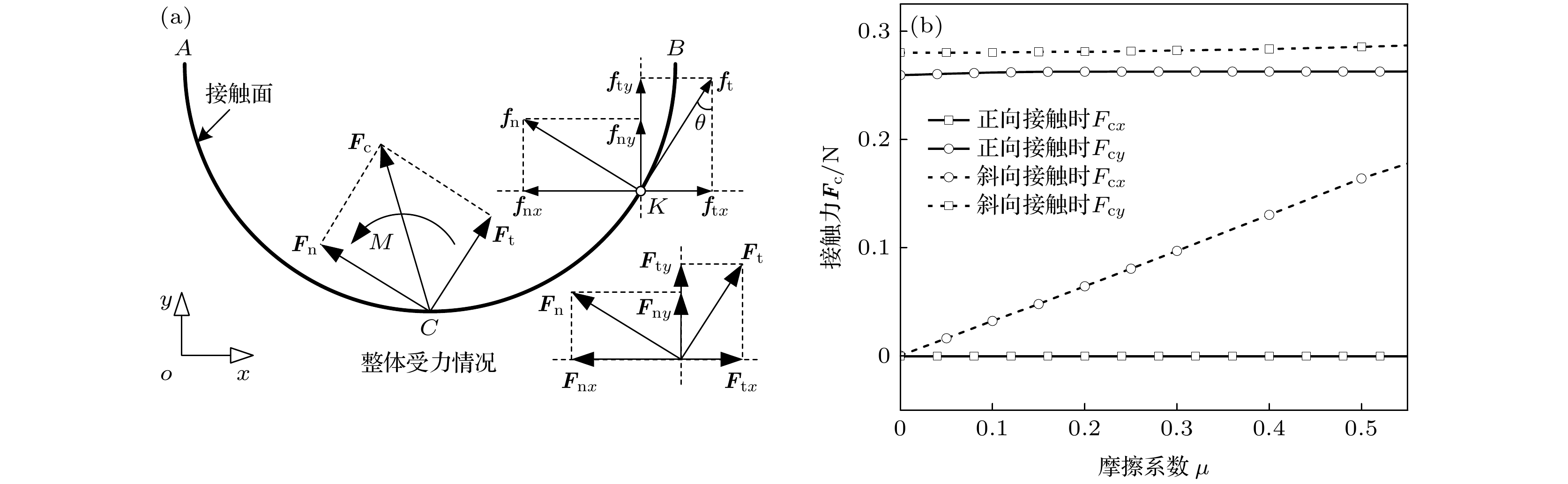
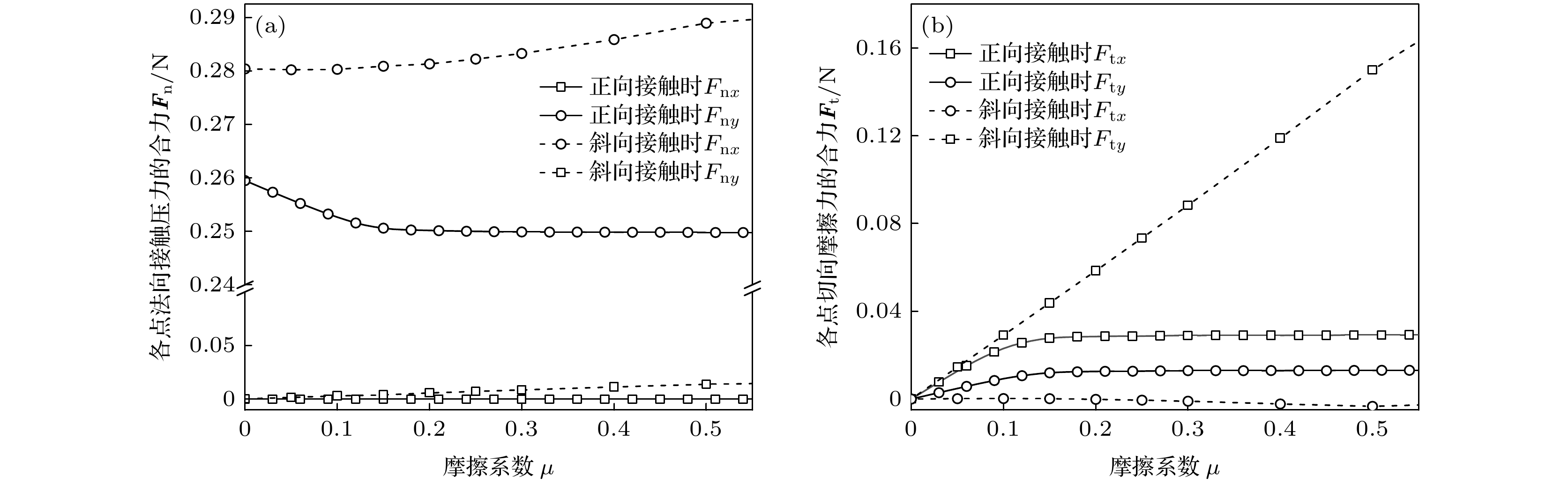
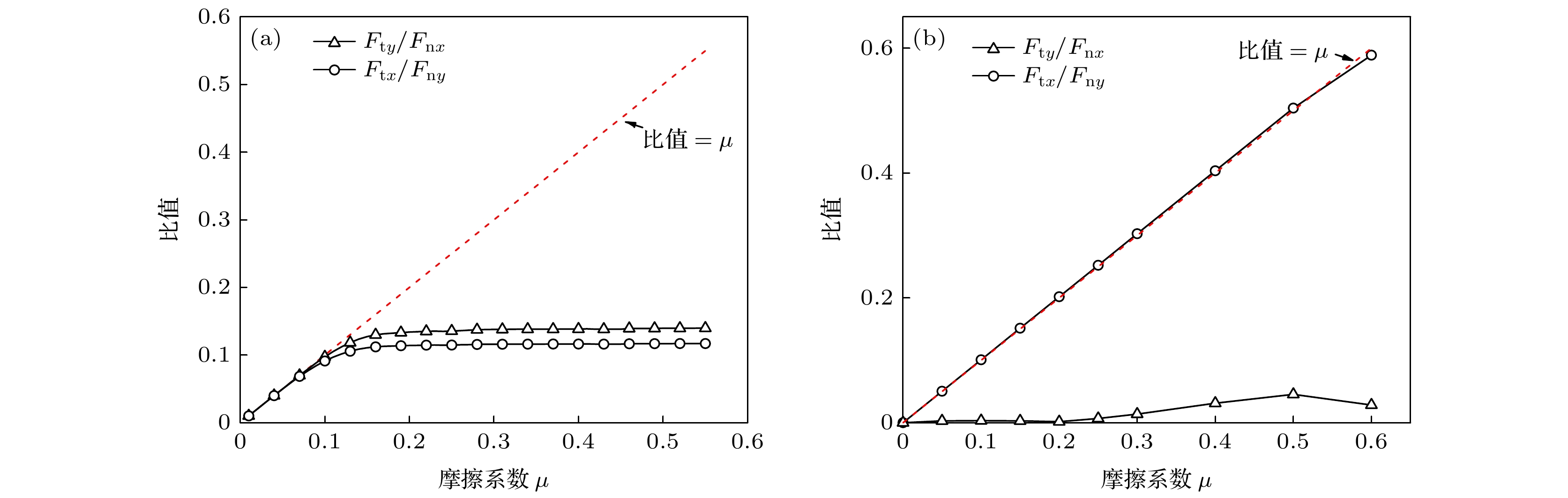
Focusing on the oblique frictional contact problem of hydrogel for soft robot, a numerical contact model is developed to analyze the nonlinear behaviors including local contact large deformation and friction effect of hydrogel soft material during oblique contact. Based on the constitutive relation of hyperelastic material, the updated free energy function of hydrogel is derived. The contact algorithm is given to compute the contact responses of both collinear contact example and oblique contact example. The applicability of classical Hertz contact theory is discussed. The influence of coefficient of friction on the stress distribution of contact zone and the contact states of contact surface are also investigated. The numerical results show that the material nonlinearity and the geometric nonlinearity (i.e. large deformation) of hydrogel lead to the invalidation of classical Hertz contact theory. For the oblique contact, the internal stress grads of hydrogel will be redistributed as the coefficient of friction increases. Meanwhile, the maximum stress position moves from underside to the contact surface. Two high stress zones occur inside and on the contact surface at the same time, respectively. Besides, when the coefficient of friction is smaller (i.e.
μ< 0.05), for the collinear contact all contact points on the contact surface are in critical state from static friction to dynamic friction. But for the oblique contact, some contact points are always in stable static friction state.














 DownLoad:
DownLoad:








