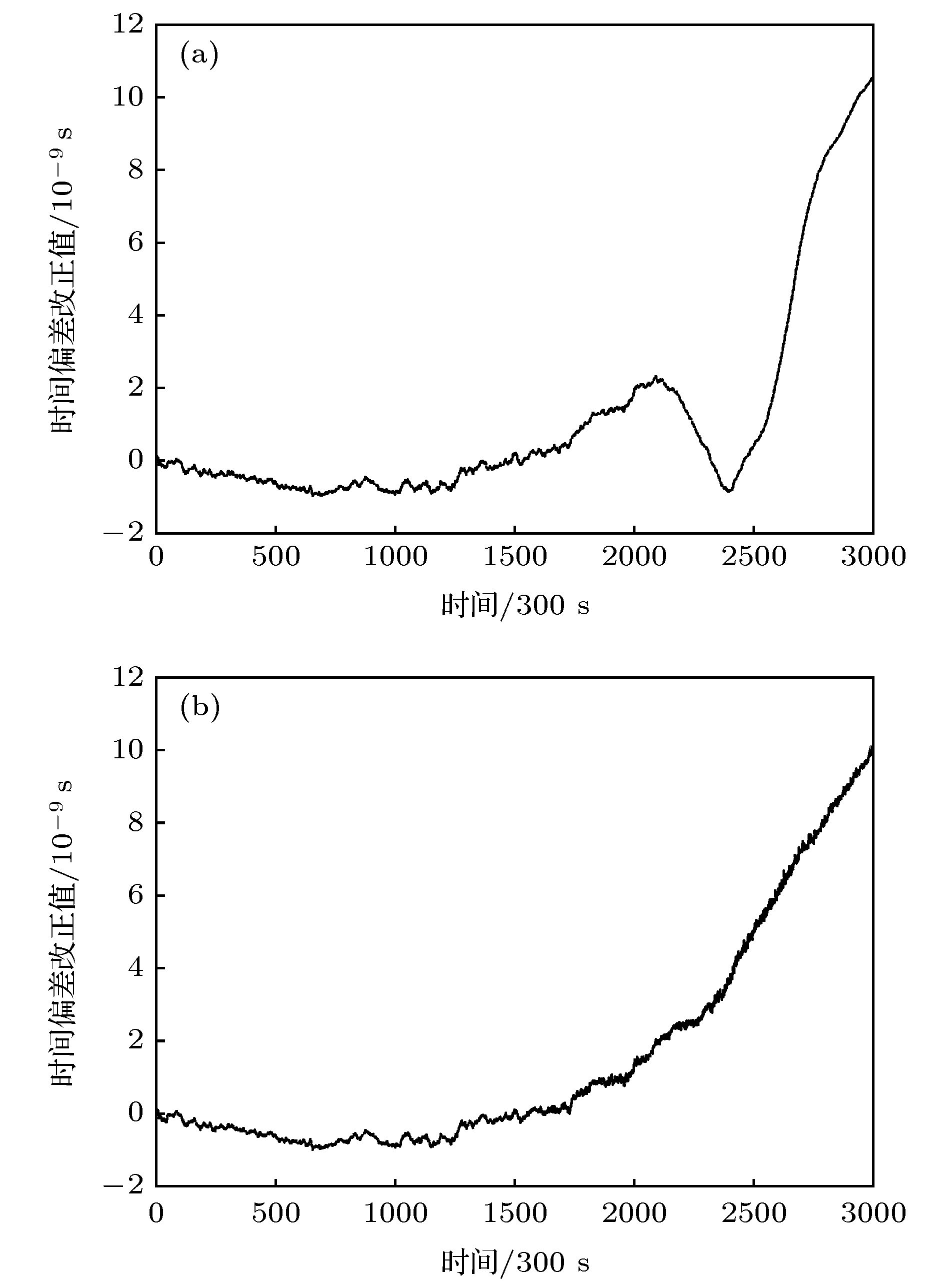
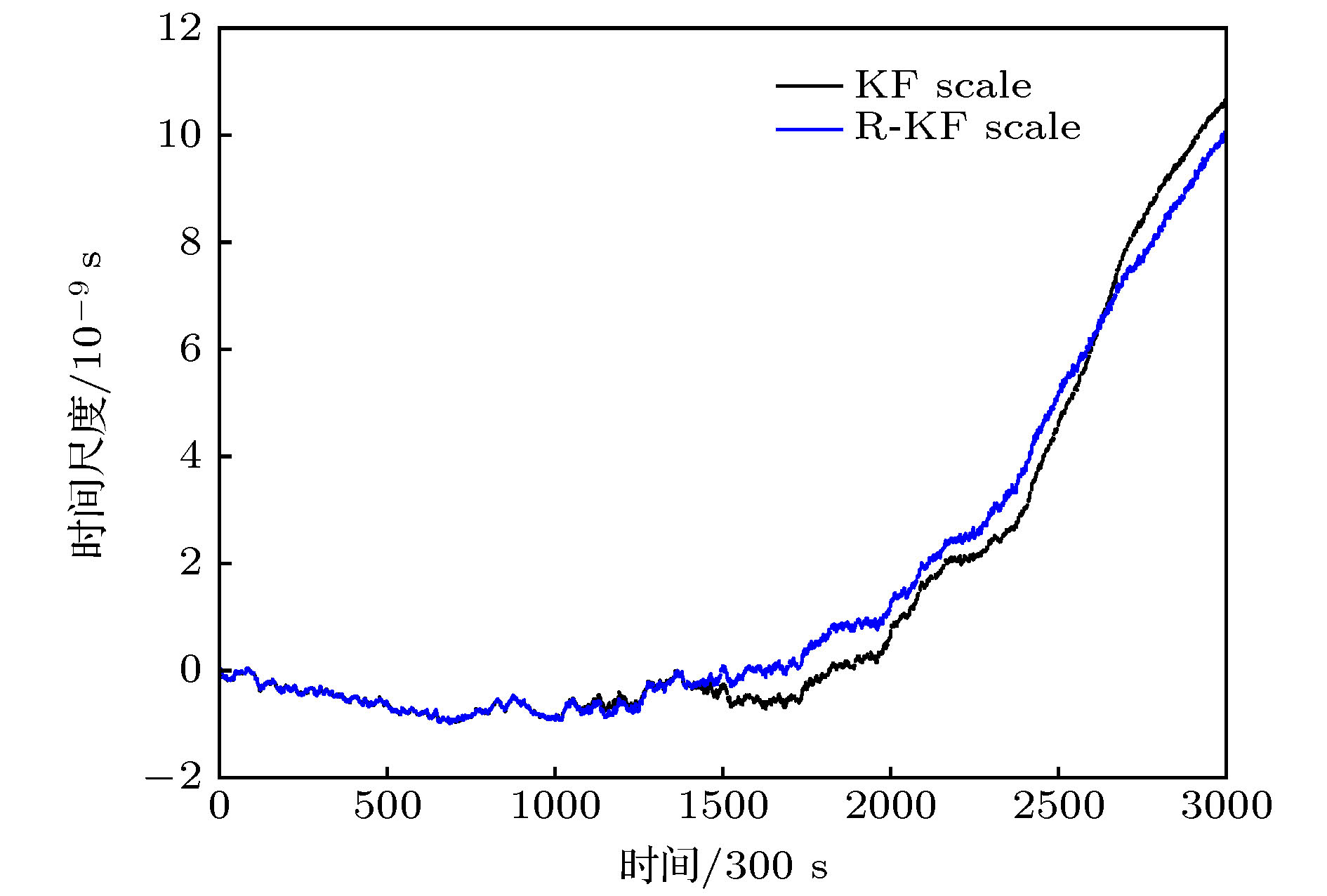
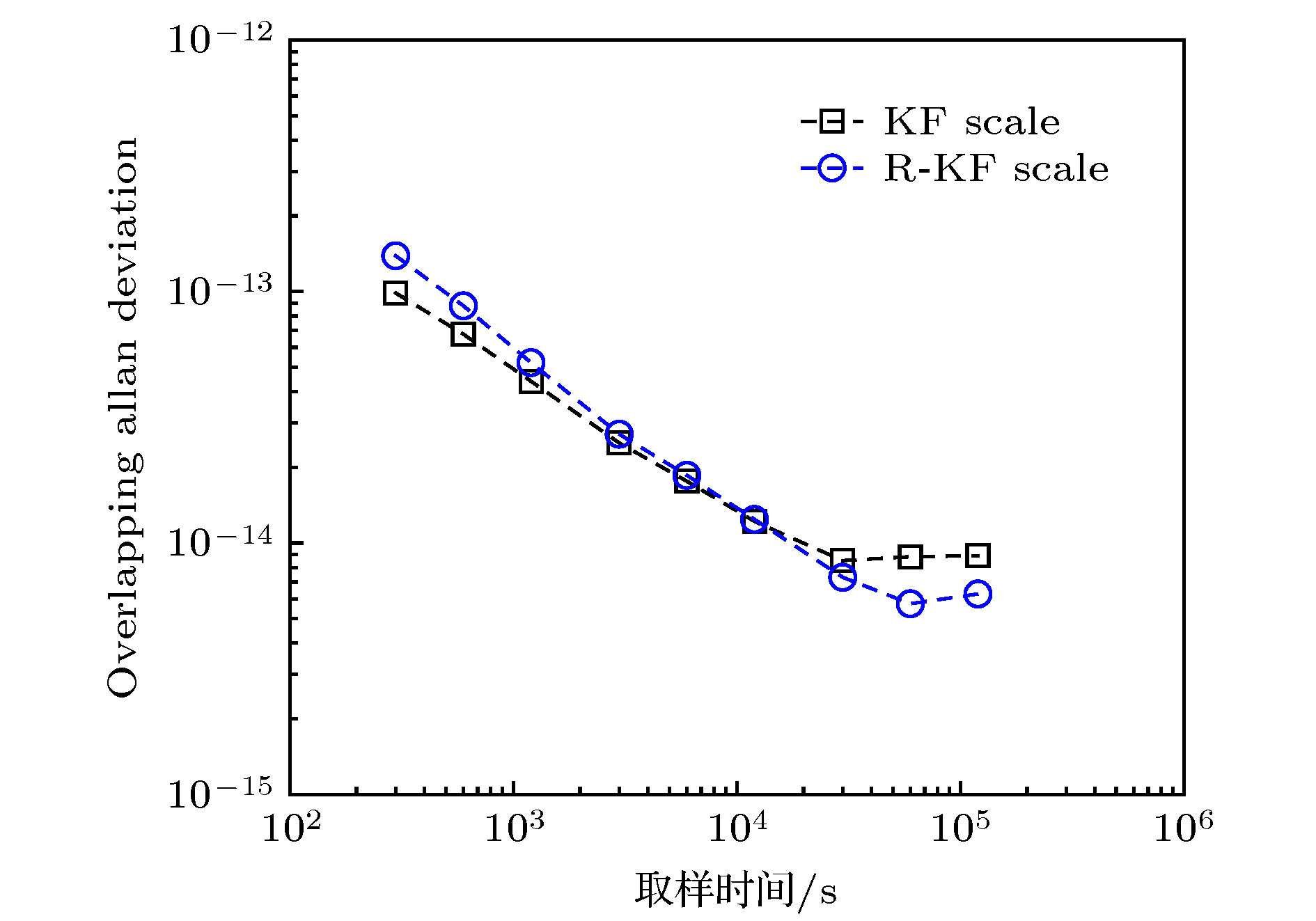
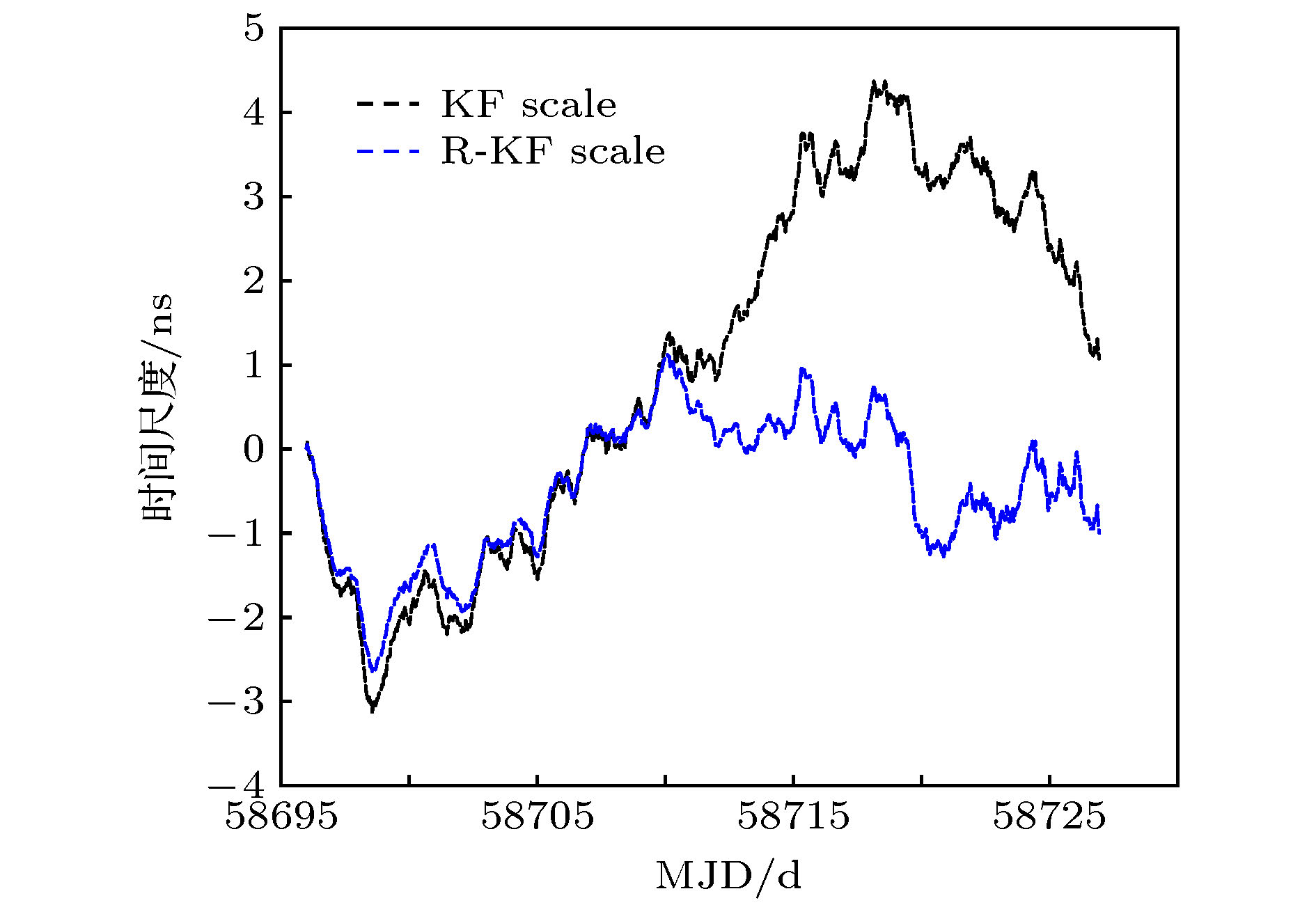
Kalman filter time scale algorithm is a method of real-time estimating atomic clock state. It is of great practical value in the time-keeping work. Reliable Kalman filter time scale algorithm requires a reliable atomic clock state model, a random model and a reasonable estimation method. However, it is difficult to construct accurate state model when the noises of atomic clock change. The random model is generally based on the prior statistical information about atomic clock noises, and the prior statistical information may be distorted. In the process of time scale calculation, the noises of atomic clocks need estimating in the Kalman filter time scale algorithm, which is quantified according to the intensity of the noise. With the change of the external environment or aging of atomic clock, the noise intensity may change, resulting in the disturbance of atomic clock state estimation in the Kalman filter time scale algorithm, which further affects the accuracy and stability of the time scale. On the other hand, the error of the noise intensity estimation of atomic clocks will also affect the performance of time scale. Therefore, it is necessary to control the disturbance caused by the variation of noise intensity or the estimation error of noise intensity. In this regard, an adaptive factor is introduced to improve the Kalman filter time scale algorithm, and another adaptive factor is introduced into the state prediction covariance matrix in Kalman filter time scale algorithm. And the values of the two adaptive factors are calculated in real time by using statistics to control the growth of the state prediction covariance. The disturbance of state estimation of atomic clock is reduced, and the accuracy and stability of time scale are improved. In this paper, the sampling interval of simulated data and the measured data are 300 s and 3600 s respectively. The simulated data and measured data are used to calculate the overlapping Allan deviations of the time scale. The results show that the improved Kalman filter time scale algorithm can improve the stability of the sampling time more than 14400 s compared with classical Kalman filter time scale algorithm, and affect the stability of the sampling time less than 14400 s. The degree of influence is related to the weight algorithm of atomic clock. The measured data in this paper are treated by the “predictability” weighting algorithm, which guarantees the long-term stability of time scale. So the simulated data and measured data show that compared with classical Kalman filter time scale algorithm, the improved Kalman filter clock time scale algorithm can improve the accuracy and the long-term stability of time scale.













 DownLoad:
CSV
DownLoad:
CSV


 DownLoad:
DownLoad:




