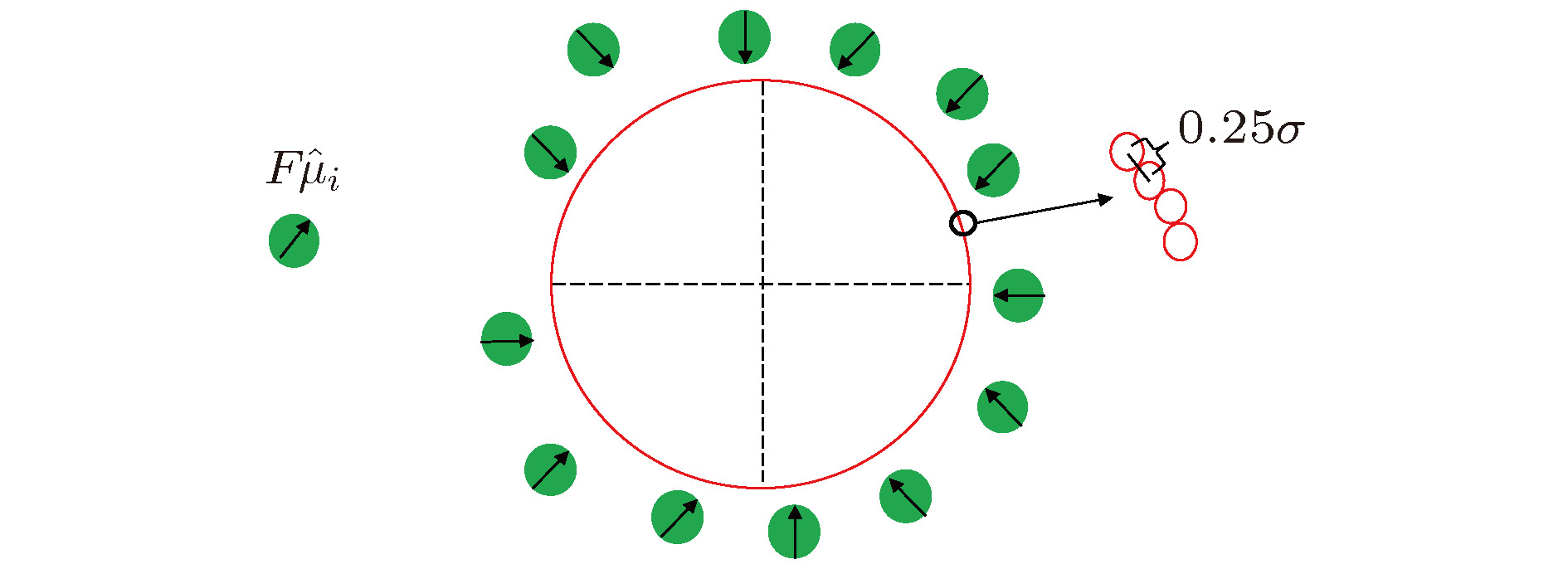
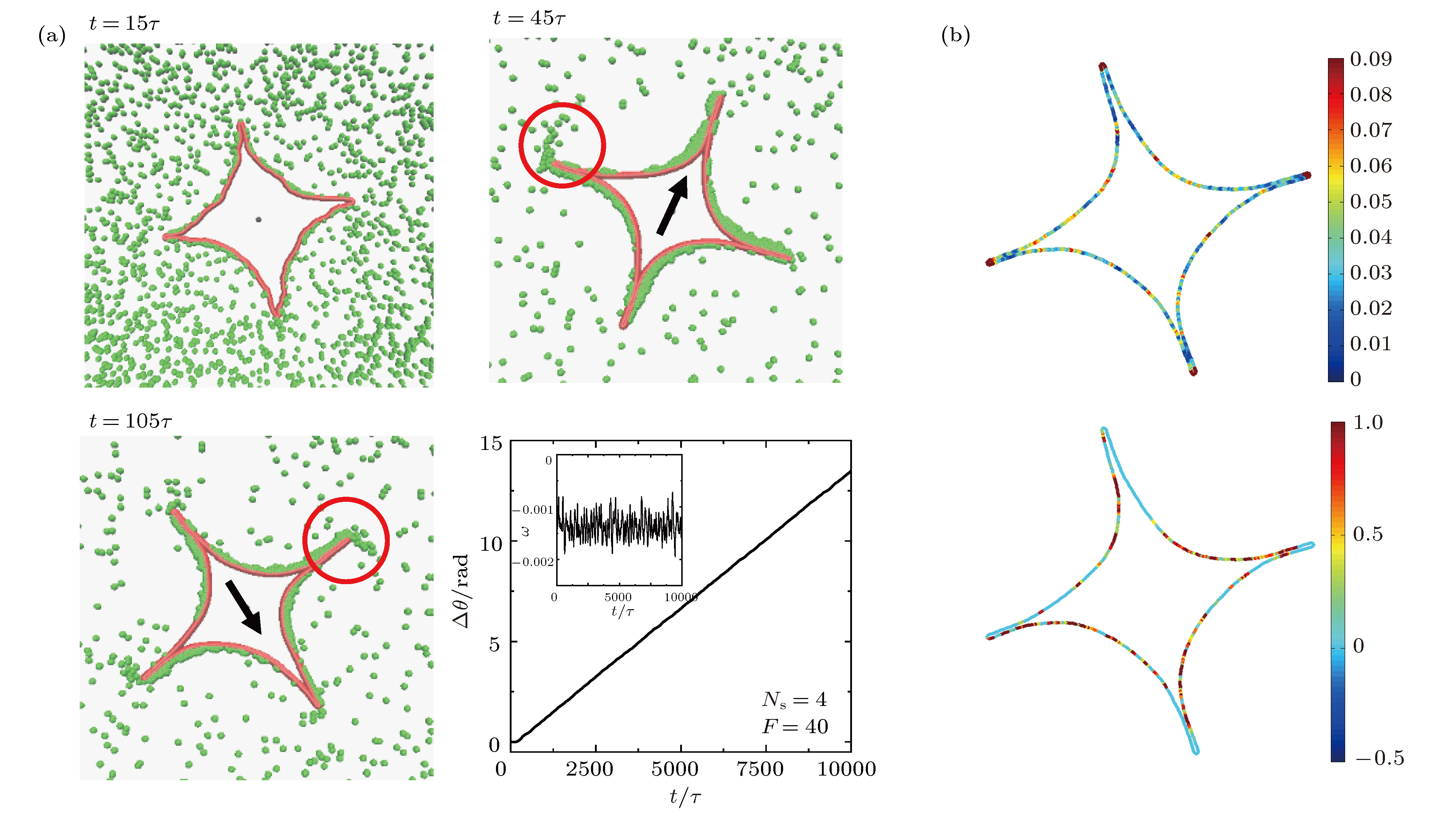
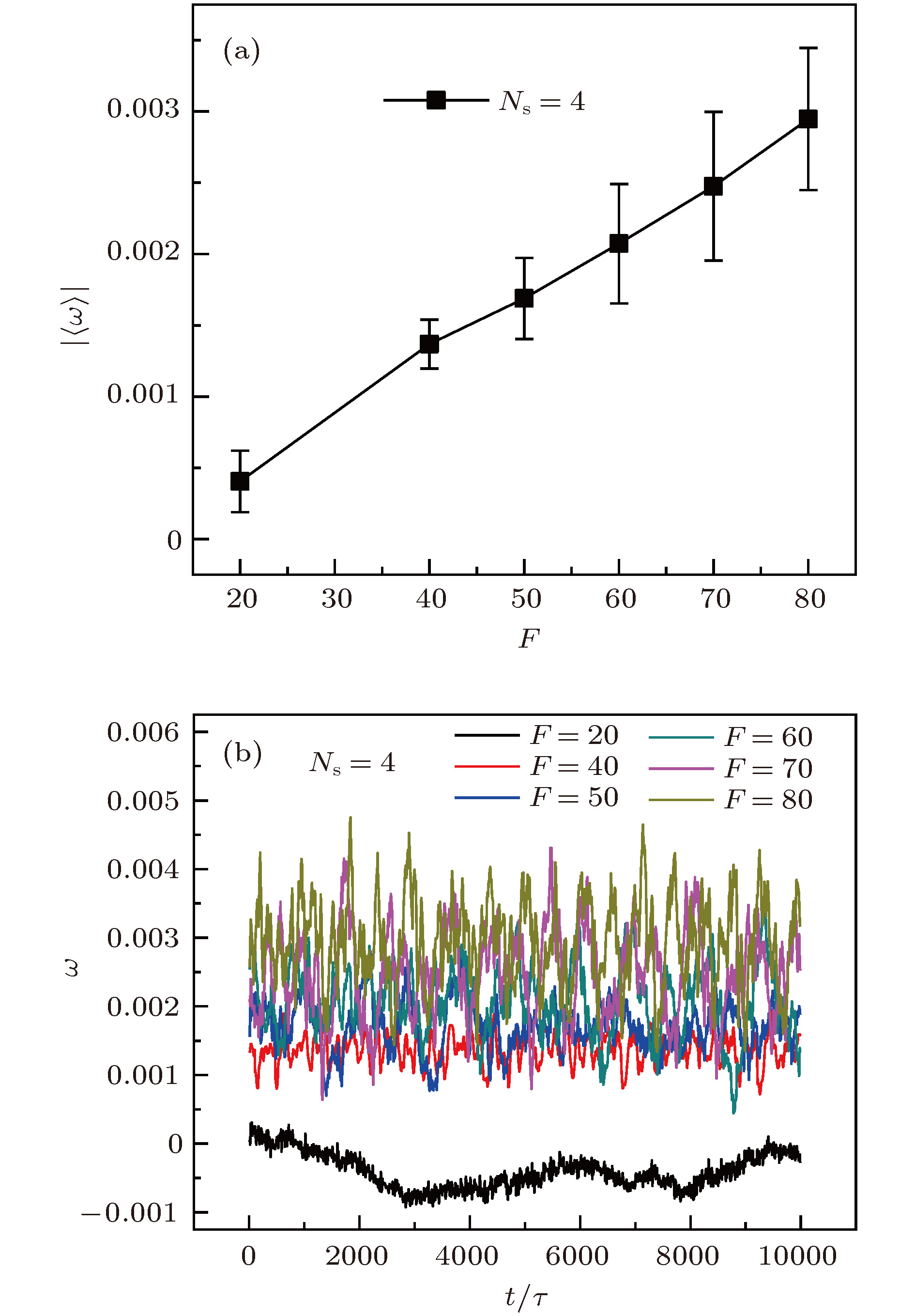
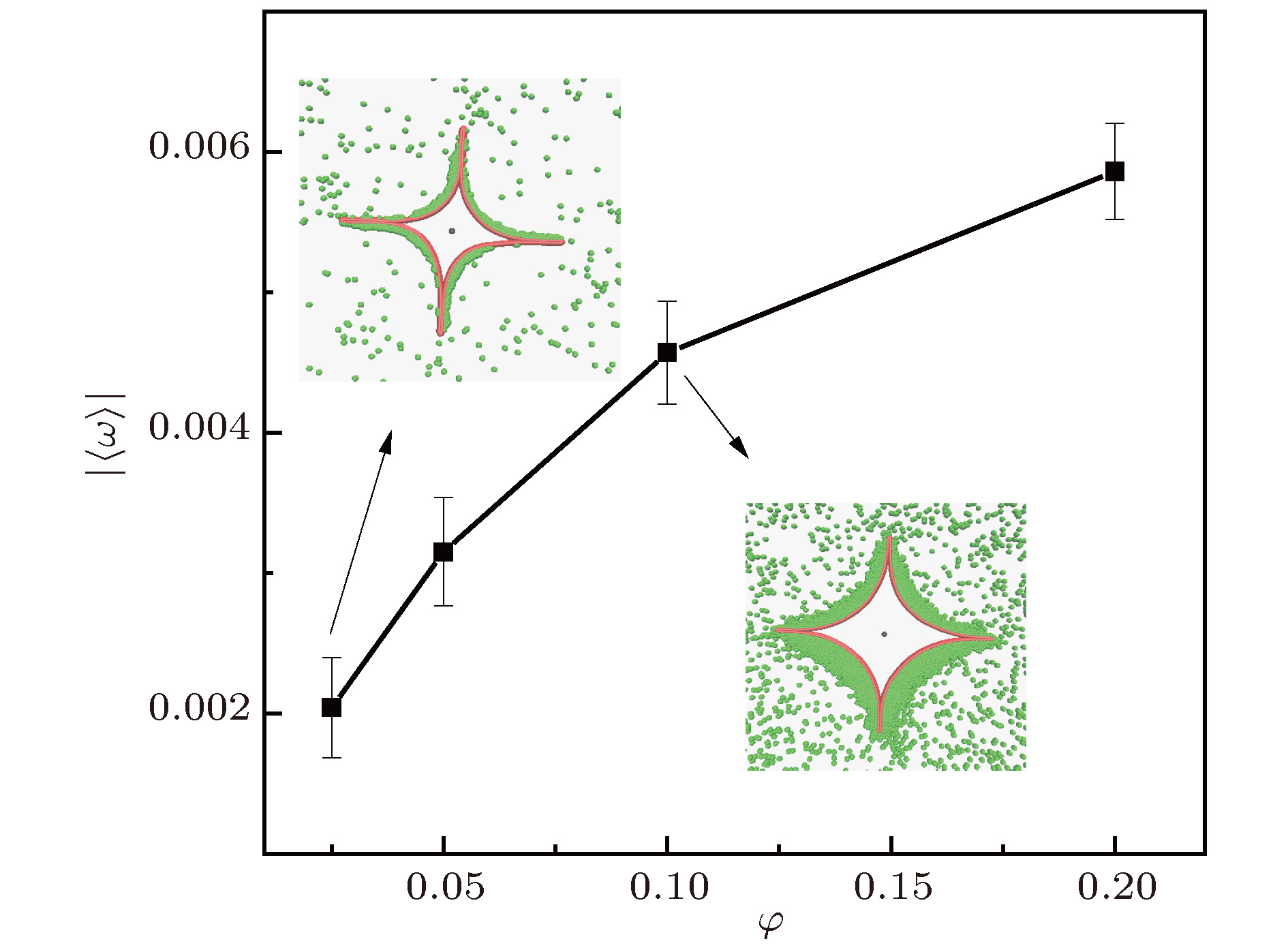
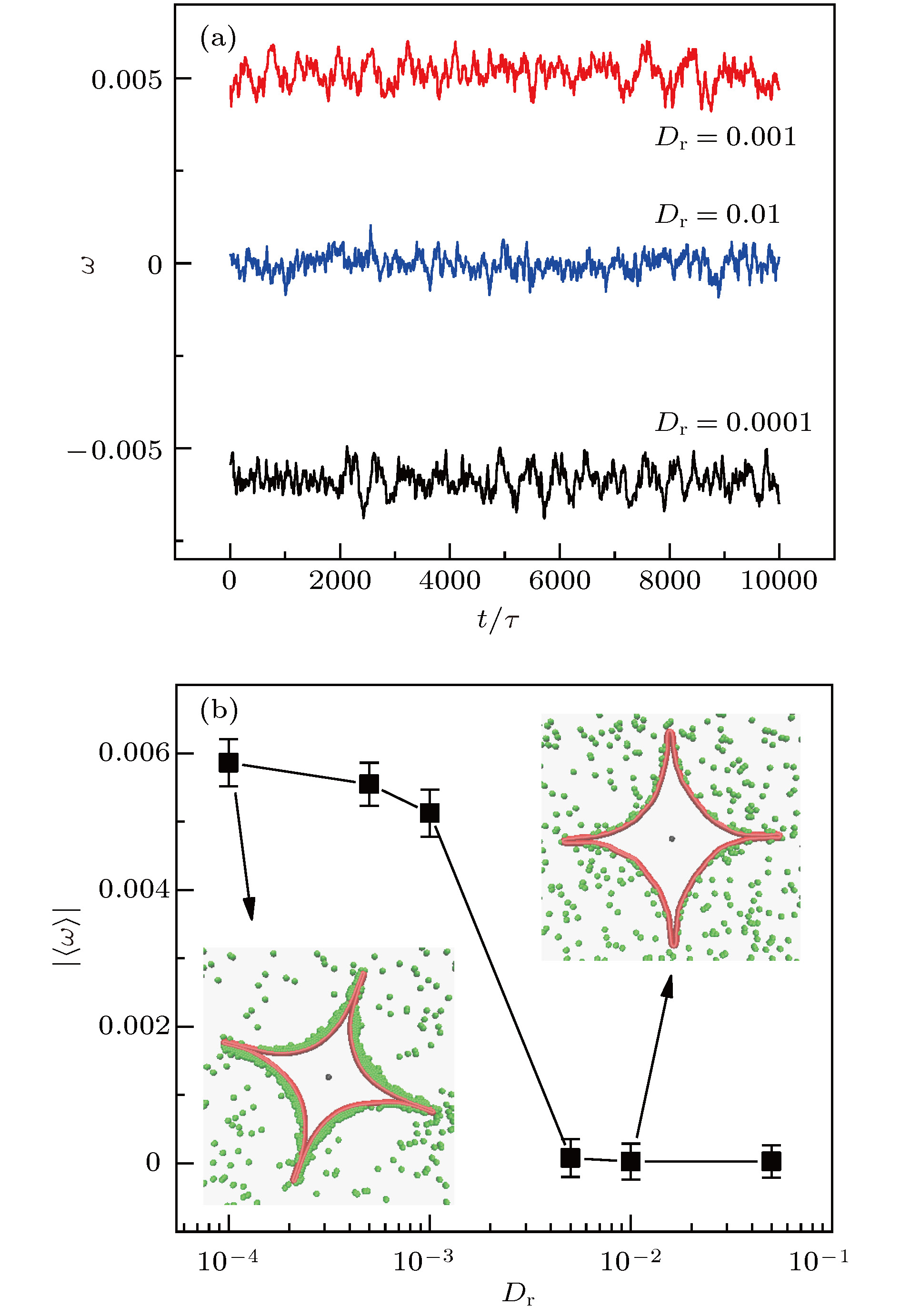
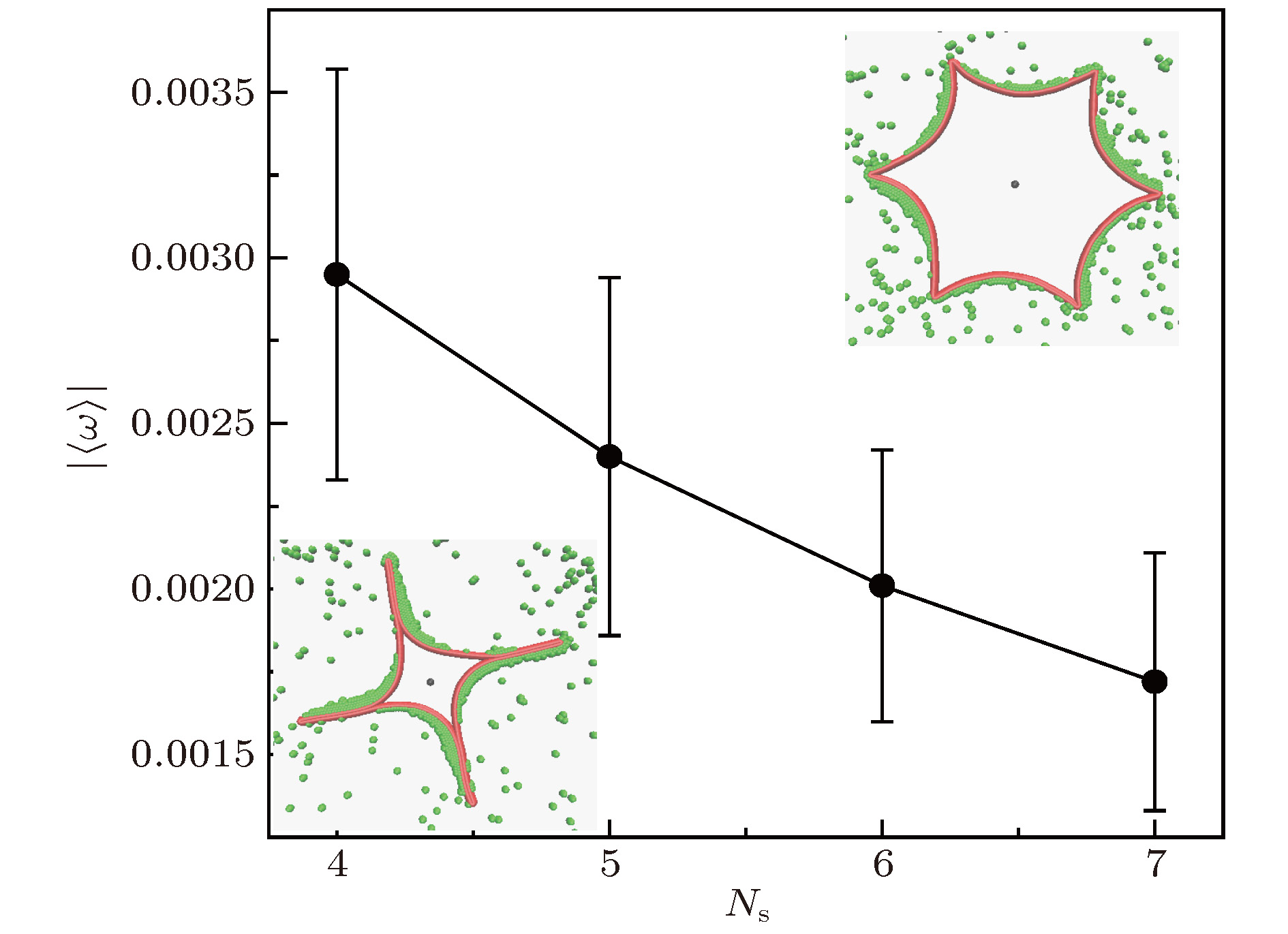
Self-propelling motionisubiquitous in the biological world, ranging from the molecular-level transportation of motor proteins along the microtubules, to the swimming of bacteria on a micrometer scale. An intriguing topic is to design microdevices or micromotors that can rectify the random motion and convert the energy into mechanical work. Here we design a soft microdevice, which may possess the advantages such as damage resistance, durability and adaptability, by utilizing two-dimensional Langevin dynamics simulation. We use a flexible chain to mimic the soft boundary of microdevice. We investigate the dynamical behaviors of microdevice when it is immersed in a thin film of active particle suspension. We find that the microdevicecan rotateunidirectionally and hence output the work. To uncover the physical mechanism of unidirectional rotation, we calculate the pressure distribution along the soft boundary. The spontaneous symmetry breaking of flexible boundary is the origin of the unidirectional rotation, which can lead to the inhomogeneous pressure distribution and hence torque on ratchet. It is because the persistent motion drives the particles to accumulate near the boundary and induce the soft boundary to deform. Further, we focus on the effect of active force and particle density on the angular velocity. With the increase of active force, the average angular velocity increases monotonically due to the increase of torque. With the increase of the number density of active particles, the average angular velocity increases. This is because the aggregation of a large number of particles is beneficial to the increase of ratchet torque. Additionally, we pay attention to the effect of rotational diffusion rate,
D
r, of active particles and the number of ratchet wheels. We find the average angular velocity decreases with the increase of rotation diffusion
D
rbecause ofthe ability of particles to weakly accumulate at high
D
rs. The average angular velocity also decreases with the increase of the number of ratchet wheels. This is because a large number of ratchet wheels weaken the asymmetry of pressure distribution and hence reduce the torque on wheel. Our work provides a new insight into the design of soft microdevices for studying the non-equilibrium system.














 DownLoad:
DownLoad:




