










-
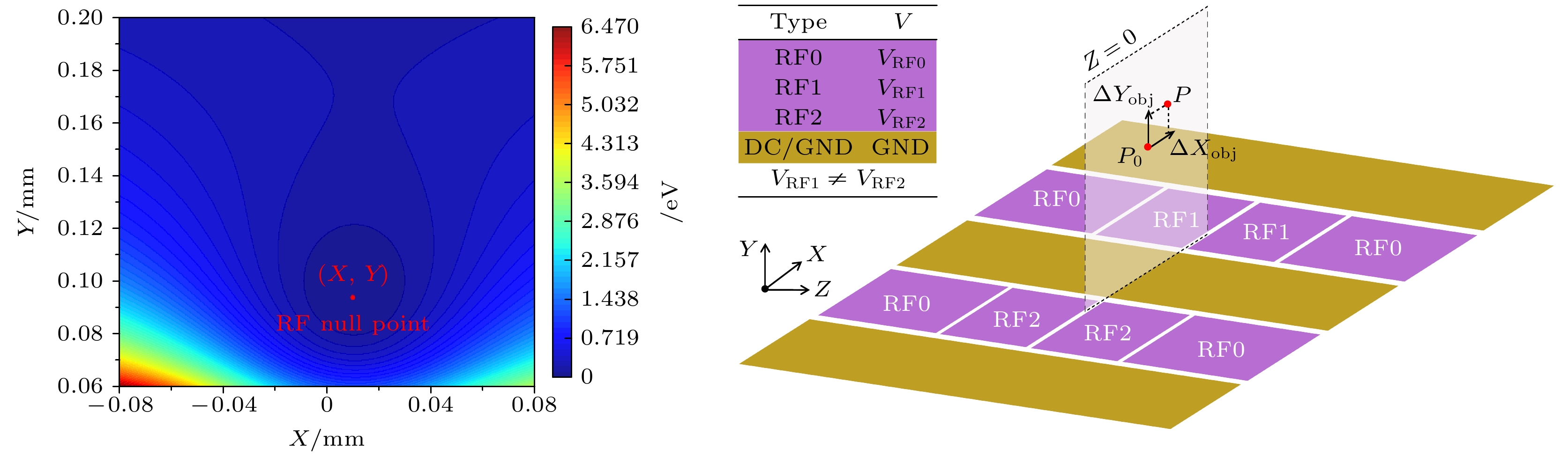
在集成光学模块的一体化离子阱中, 极易出现光学焦点与囚禁离子鞍点错位的问题, 严重阻碍了该实验方法的实用性. 为解决该问题, 可利用多射频场方法对离子鞍点位置进行补偿和移动. 然而, 在实际实验过程中, 多射频方法的应用, 需要知道鞍点实际空间位置对应的应加载射频电压幅值. 这就需要建立一套数学模型, 对二者关系进行描述. 模型的精确程度决定了鞍点空间位置的控制精度、模型的简易程度决定了求解过程的速度. 因此, 本文提出一种基于数值仿真电场分布结果和多项式拟合方法而建立的多射频电场电压和鞍点位置关系的数学模型, 可以在无需考虑物理机制和模型基础上, 快速、准确地给出二者之间的数学描述. 本文利用数值方法对该模型的正确性和适用范围进行了验证和讨论, 可以在实验中快速准确地给出应加载射频电压幅值, 使鞍点移动并与光学焦点重合, 该方法极大地降低了由于求解引起的时间延迟、提高了鞍点位置移动过程中反馈环路带宽.In an integrated ion trap with integrated optical modules, the problem of misalignment between the optical focus and the trapped ion saddle point is very likely to occur, which seriously hinders the practicality of the experimental method. To solve this problem, the multi-RF field method can be used to compensate for and move the ion saddle point position. However, in the actual experimental process, the application of the multi-RF method requires the knowledge of the amplitude of the RF voltage to be loaded corresponding to the actual spatial position of the saddle point. Therefore, a set of mathematical models is established to describe the relationship. The accuracy of the model determines the control accuracy of the spatial position of the saddle point, and the simplicity of the model determines the speed of the solution process. Therefore, in this work, a mathematical model of the relationship between the multi-RF electric field voltage and the saddle point position is proposed based on the numerically simulated electric field distribution and the polynomial fitting method. It can quickly and accurately give a mathematical description between the two without considering the physical mechanism or model. Numerical method is adopted to verify and discuss the correctness and scope of application of the model, and can quickly and accurately provide the amplitude of the RF voltage to be loaded in the experiment, causing the saddle point to move and coincide with the optical focus. This method greatly reduces the time delay caused by the solution and improves the feedback loop bandwidth during the movement of the saddle point position.
-
Keywords:
- surface ion trap /
- saddle point movement /
- multiple RF fields control /
- boundary element analysis
-
EXRF0(X, Y) EXRF1(X, Y) EXRF2(X, Y) EYRF0(X, Y) EYRF1(X, Y) EYRF2(X, Y) X阶数 1 2 2 1 2 2 Y阶数 3 3 3 1 3 3 Adj R-sq 0.9979 0.9977 0.9977 0.9992 0.9963 0.9963  下载: 导出CSV
下载: 导出CSV
EXRF0(X, Y) EXRF1(X, Y) EXRF2(X, Y) EYRF0(X, Y) EYRF1(X, Y) EYRF2(X, Y) X阶数 1 2 2 1 2 2 Y阶数 4 4 4 1 4 4 Adj R-sq 0.9996 0.9997 0.9997 0.9992 0.9994 0.9994
下载: 导出CSV
EXRF0(X, Y) EXRF1(X, Y) EXRF2(X, Y) EYRF0(X, Y) EYRF1(X, Y) EYRF2(X, Y) X阶数 5 5 5 5 5 5 Y阶数 5 5 5 5 5 5 Adj R-sq 1.0000 1.0000 1.0000 1.0000 0.9999 0.9999
下载: 导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38]



 下载:
下载:





计量
- 文章访问数: 102
- PDF下载量: 6
- 被引次数: 0