










-
混沌时间序列能够较好反映真实环境的非线性和非平稳性特性, 然而具有二阶统计特性的核自适应滤波器(kernel adaptive filter, KAF)在处理含噪声和异常值的混沌时间序列时, 其预测性能显著下降. 为提高核自适应滤波器的鲁棒性, 本文提出了一种用于测量非线性相似度的柯西核损失(Cauchy kernel loss, CKL), 并采用半平方(half-quadratic, HQ)方法保证了CKL的全局凸性. 为改善随机梯度下降法收敛速度较慢且容易陷入局部最优的不足, 采用共轭梯度(conjugate gradient, CG)方法优化CKL. 进一步, 为解决核矩阵网络增长的问题, 采取Nyström稀疏策略近似核矩阵, 并利用概率密度秩量化(probability density rank-based quantization, PRQ)提高逼近精度. 基于此, 本文提出了一种新的基于Nyström和PRQ的柯西核共轭梯度(Nyström Cauchy kernel conjugate gradient with PRQ, NCKCG-PRQ)算法有效实现了混沌时间序列的预测. 基于合成和真实两类混沌时间序列验证了所提NCKCG-PRQ算法在稳态性能, 鲁棒性和计算存储复杂度上的优势.Chaotic time series can well reflect the nonlinearity and non-stationarity of real environment changes. The traditional kernel adaptive filter (KAF) with second-order statistical characteristics suffers performance degeneration dramatically for predicting chaotic time series containing noises and outliers. In order to improve the robustness of adaptive filters in the presence of impulsive noise, a nonlinear similarity measure named Cauchy kernel loss (CKL) is proposed, and the global convexity of CKL is guaranteed by the half-quadratic (HQ) method. To improve the convergence rate of stochastic gradient descent and avoid a local optimum simultaneously, the conjugate gradient (CG) method is used to optimize CKL. Furthermore, to address the issue of kernel matrix network growth, the Nyström sparse strategy is adopted to approximate the kernel matrix and then the probability density rank-based quantization (PRQ) is used to improve the approximation accuracy. To this end, a novel Nyström Cauchy kernel conjugate gradient with PRQ (NCKCG-PRQ) algorithm is proposed for the prediction of chaotic time series in this paper. Simulations on prediction of synthetic and real-world chaotic time series validate the advantages of the proposed algorithm in terms of filtering accuracy, robustness, and computational storage complexity.
-
Keywords:
- prediction of chaotic time series/
- kernel adaptive filtering/
- Cauchy kernel loss/
- Nyström method
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] -
输入: 输入输出对$\left\{ { {{\boldsymbol{u}}_k}, {d_k} } \right\}, k{\text{ = } }1, 2, \cdot \cdot \cdot$ 初始化参数: $ {\boldsymbol{\hat u}}(i) $为PRQ采样后样本点; $ {\boldsymbol{\varLambda }} $和W分别为有关$ {\boldsymbol{\hat U}} $核矩阵的特征值降序排列的对角矩阵和对应特征向量构成列正交矩阵; ${ {\boldsymbol{K} }_c}(1) = [\kappa ({\boldsymbol{u} }(1), {\boldsymbol{\hat u} }(1)), \cdots , \kappa ({\boldsymbol{u} }(1), {\boldsymbol{\hat u} }(m))]$为初始核向量; 映射输入$ {{\boldsymbol{z}}_1} = {{\boldsymbol{\varLambda }}^{ - 1/2}}{{\boldsymbol{W}}^{\text{T}}}{{\boldsymbol{K}}_c}{(1)^{\text{T}}} $; 权重$ {\boldsymbol{\varOmega }}_1^z = 0 $; 加权函数$ {\zeta _1} = {\exp}( - {s_1})/\left\{ {{\delta ^2}\left[ {{\eta ^{ - 1}} + {s_1}{\exp}( - {s_1})} \right]} \right\} $; 期望$ {d_1}{\text{ = }}{({{\boldsymbol{\varOmega }}_1}^z)^{\text{T}}}{{\boldsymbol{z}}_1} $; 相关矩阵$ R_1^z = {\zeta _1}{{\boldsymbol{z}}_1}{\boldsymbol{z}}_1^{\rm T} $; 互相关向量${\boldsymbol{c}}_1^z={\zeta _1}{d_1}{{\bf{z}}_1}$; 冗余向量${\boldsymbol{r}}_1^z ={\boldsymbol{ c}}_1^z - {\boldsymbol{R}}_1^z{\boldsymbol{\varOmega } }_1^z$; 方向向量${\boldsymbol{p}}_1^z = {\boldsymbol{r}}_1^z$, 遗忘因子$ \lambda {\text{ = }}0.999 $
循环$ \left( {k{\text{ = 2}}, 3, \cdot \cdot \cdot } \right) $:1.输入核向量${ {\boldsymbol{K} }_c}(i) = [\kappa ({\boldsymbol{u} }(i), {\boldsymbol{\hat u} }(1)), \cdots , \kappa ({\boldsymbol{u} }(i), {\boldsymbol{\hat u} }(m)]$;
2.映射输入${\boldsymbol{z} }( \cdot ) = { {\boldsymbol{\varLambda } }^{ - 1/2} }{ {\boldsymbol{W} }^{\text{T} } }{[\kappa ( \cdot , {\boldsymbol{\hat u} }(1)), \cdots , \kappa ( \cdot , {\boldsymbol{\hat u} }(m))]^{\text{T} } }$;
3.误差更新$ {e_{k + 1}} = {d_{k + 1}} - {\left( {{\boldsymbol{\varOmega }}_k^z} \right)^{\text{T}}}{{\boldsymbol{z}}_{k + 1}} $, 加权函数$ {\zeta _k} = {\exp}( - {s_k})/\left\{ {{\delta ^2}\left[ {{\eta ^{ - 1}} + {s_k}{\exp}( - {s_k})} \right]} \right\} $
4.自相关矩阵更新${\boldsymbol{R}}_{k + 1}^z = \lambda {\boldsymbol{R}}_k^z + {\zeta _{k + 1} }{ {\boldsymbol{z} }_{k + 1} }{\boldsymbol{z} }_{k + 1}^{\rm T}$, 计算步长${\alpha _k} = \frac{ { { {\left( {{\boldsymbol{p}}_k^z} \right)}^{\text{T} } }{\boldsymbol{r}}_k^z} }{ { { {\left( {{\boldsymbol{p}}_k^z} \right)}^{\text{T} } }{\boldsymbol{R}}_{k + 1}^z{\boldsymbol{p}}_k^z} }$;
5.权重更新${\boldsymbol{\varOmega } }_{k + 1}^z = {\boldsymbol{\varOmega } }_k^z + {\alpha _k}{\boldsymbol{p}}_k^z$, 残差向量更新${\boldsymbol{r}}_{k + 1}^z = \lambda {\boldsymbol{r}}_k^z - {\alpha _k}{\boldsymbol{R}}_{k + 1}^z{\boldsymbol{p}}_k^z + {\zeta _{k + 1} }{{\bf{z}}_{k + 1} }{{\boldsymbol{e}}_{k + 1} }$;
6.计算步长 ${\beta _k} = \frac{ { { {\left( {{\boldsymbol{r}}_{k + 1}^z} \right)}^{\text{T} } }\left( {{\boldsymbol{r}}_{k + 1}^z - {\boldsymbol{r}}_k^z} \right)} }{ { { {\left( {{\boldsymbol{r}}_k^z} \right)}^{\text{T} } }{\boldsymbol{r}}_k^z} }$, 共轭方向更新${\boldsymbol{p}}_{k + 1}^z = {\boldsymbol{r}}_{k + 1}^z + {\beta _k}r_k^z$
循环终止 下载:
导出CSV
下载:
导出CSV
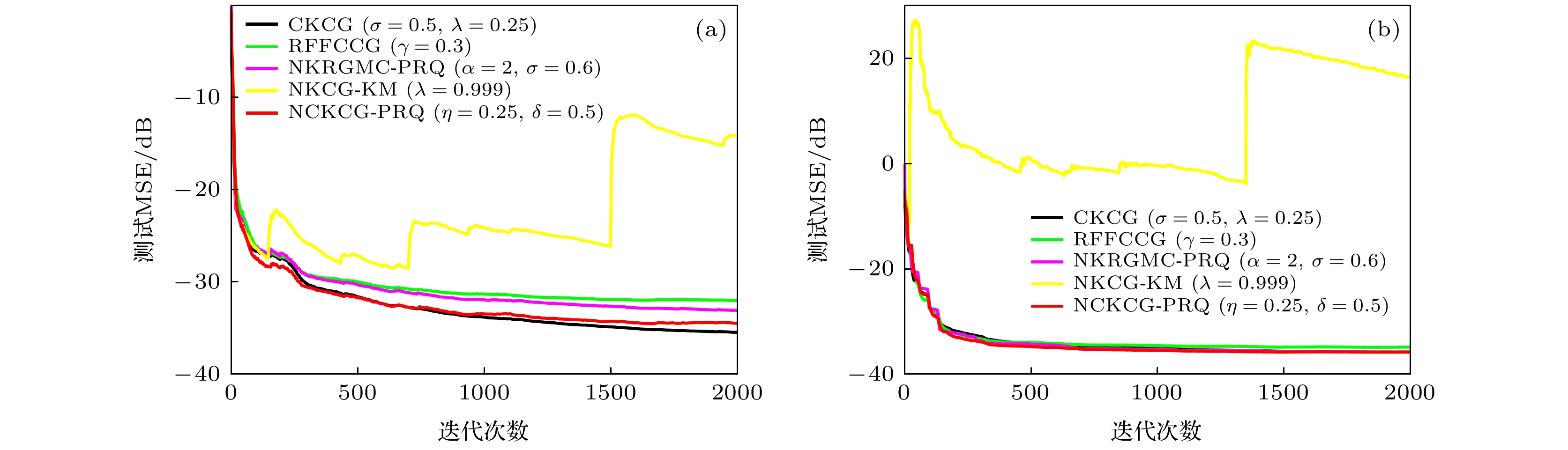
实验模型 算法 字典数目 运算时间/s 稳态MSE/dB MG混沌时间序列 CKCG 2000 41.486 –35.443 RFFCCG 60 2.095 –32.006 NKRGMC-PRQ 60 2.383 –33.068 NKCG-KM 60 3.745 N/A NCKCG-PRQ 60 1.584 –34.446 下载:
导出CSV
实验模型 算法 字典数目 运算时间/s 稳态MSE/dB 蔡氏混沌时间序列 CKCG 2000 42.618 –35.840 RFFCCG 13 1.128 –34.926 NKRGMC-PRQ 13 0.988 –35.819 NKCG-KM 13 1.146 N/A NCKCG-PRQ 13 0.957 –35.865 下载:
导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36]

 下载:
下载:
计量
- 文章访问数:3872
- PDF下载量:59
- 被引次数:0