










-
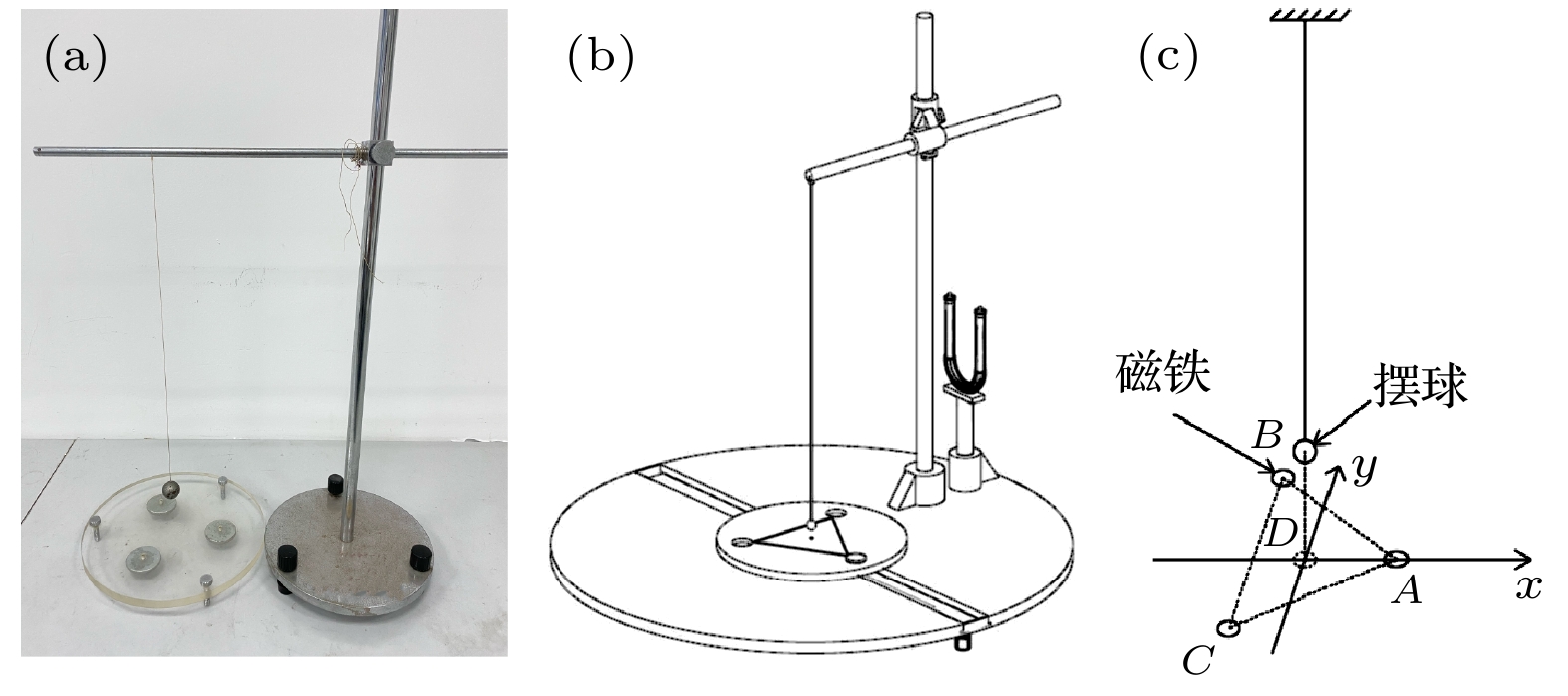
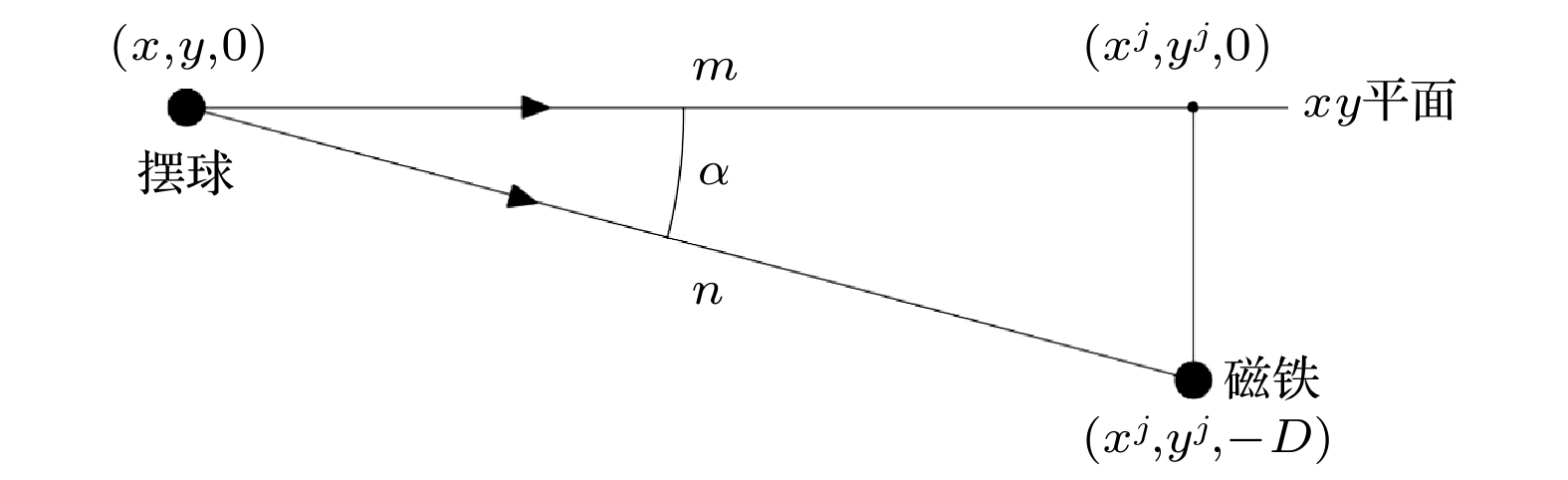
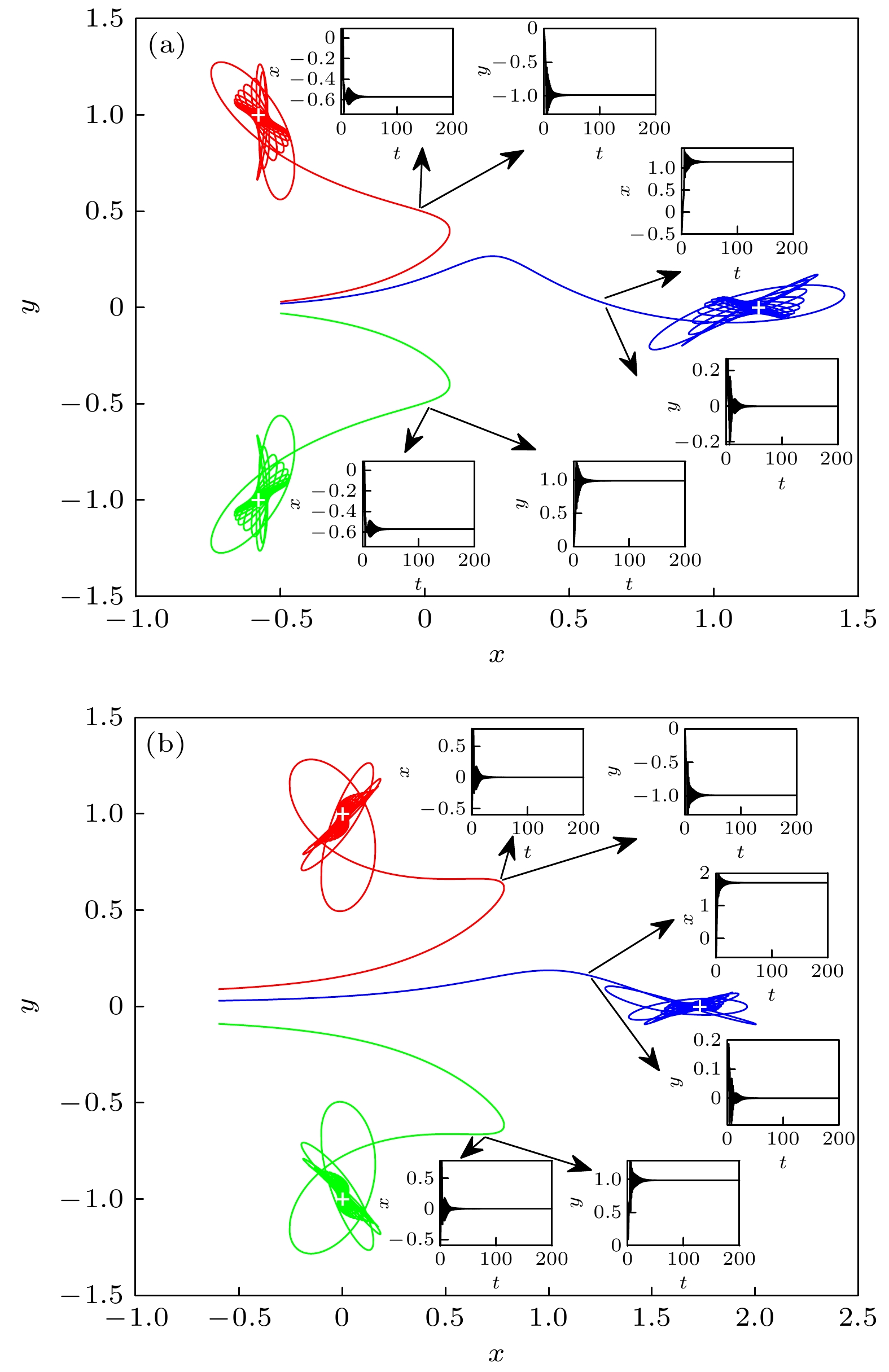
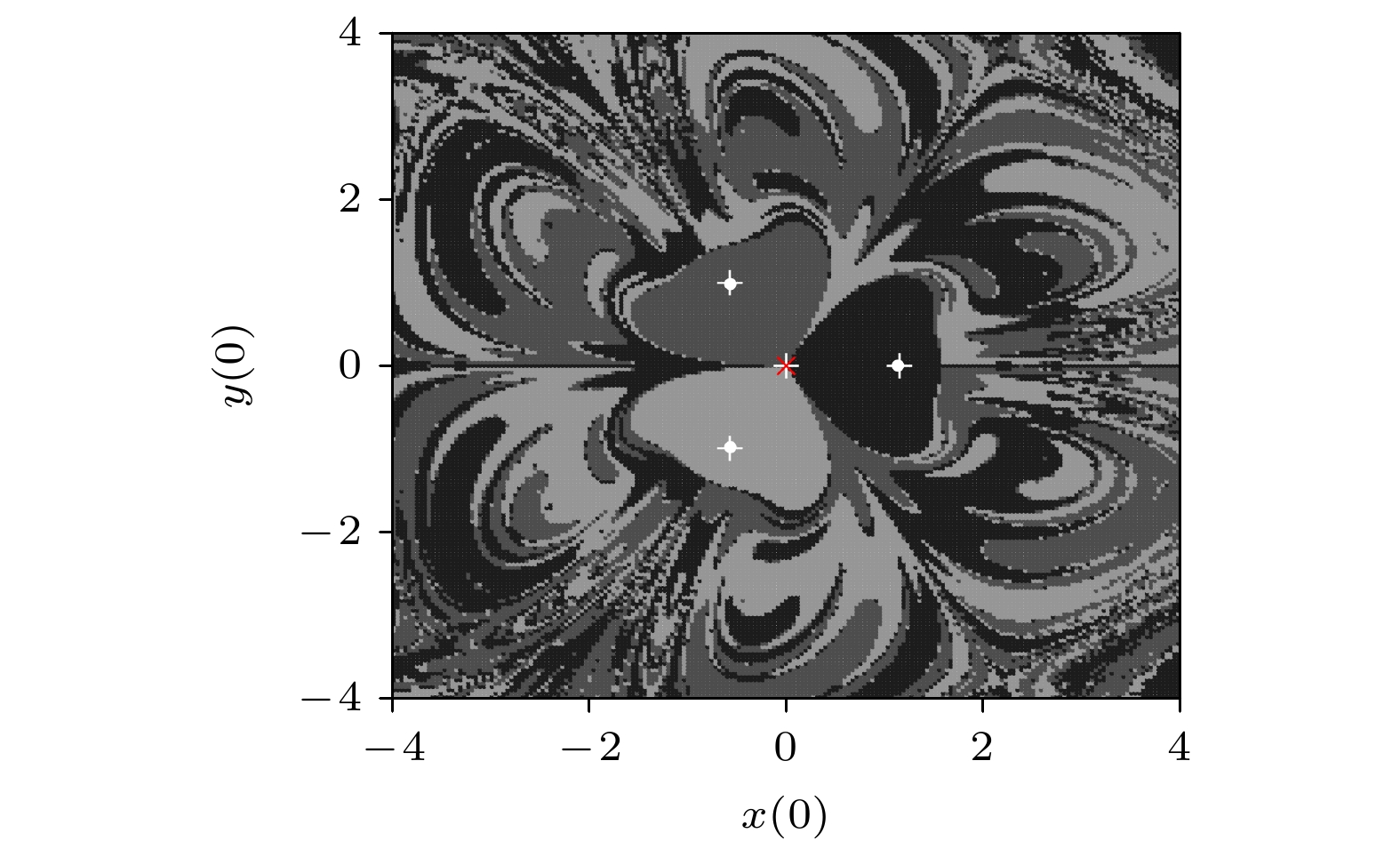
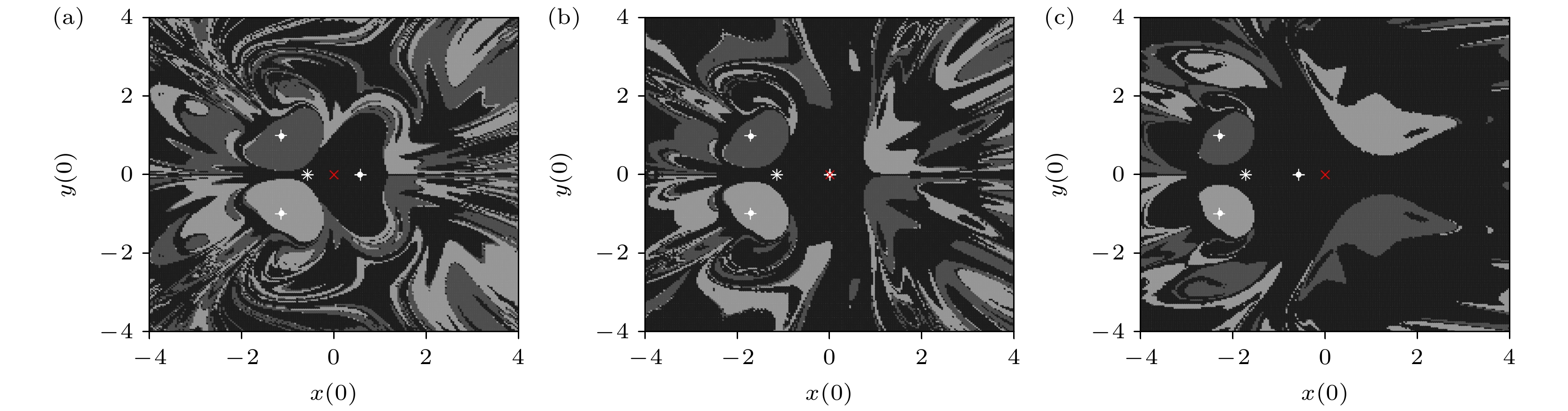
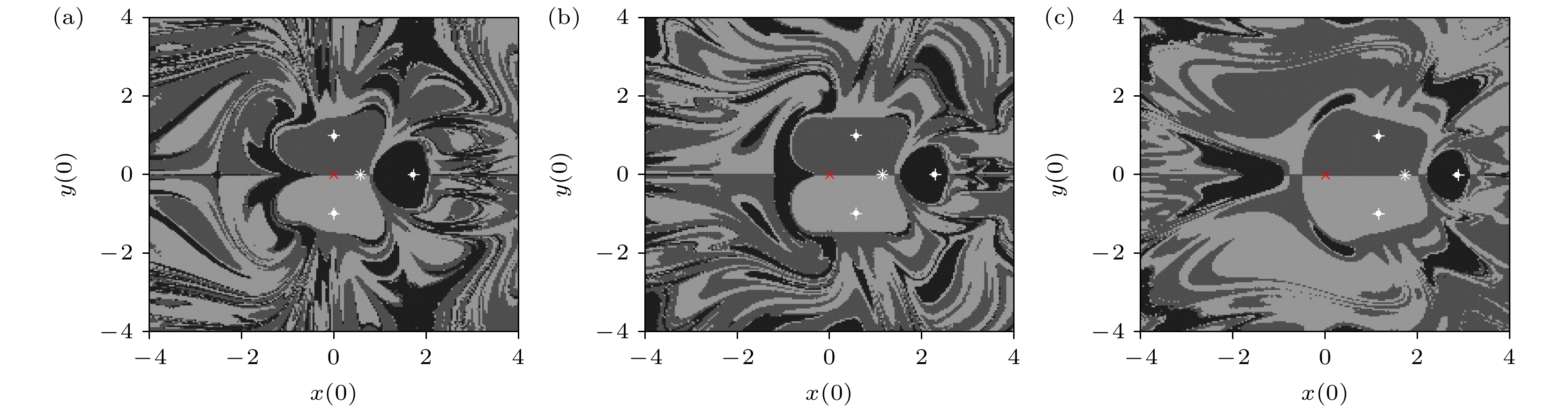
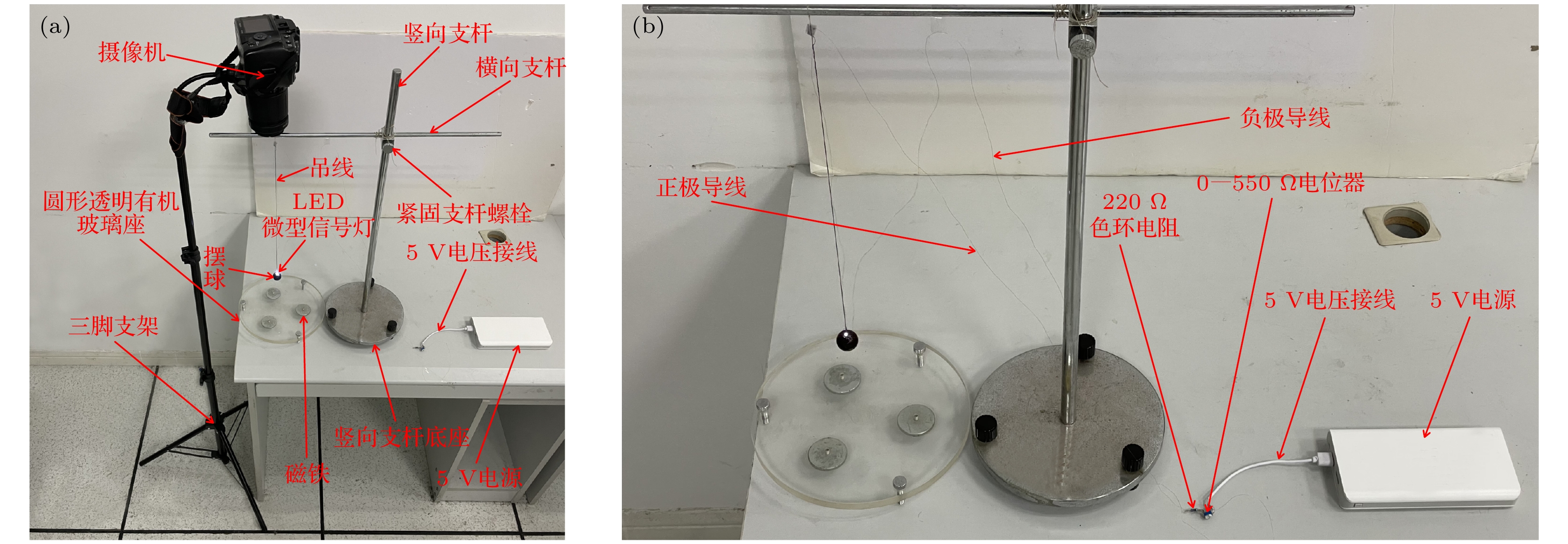
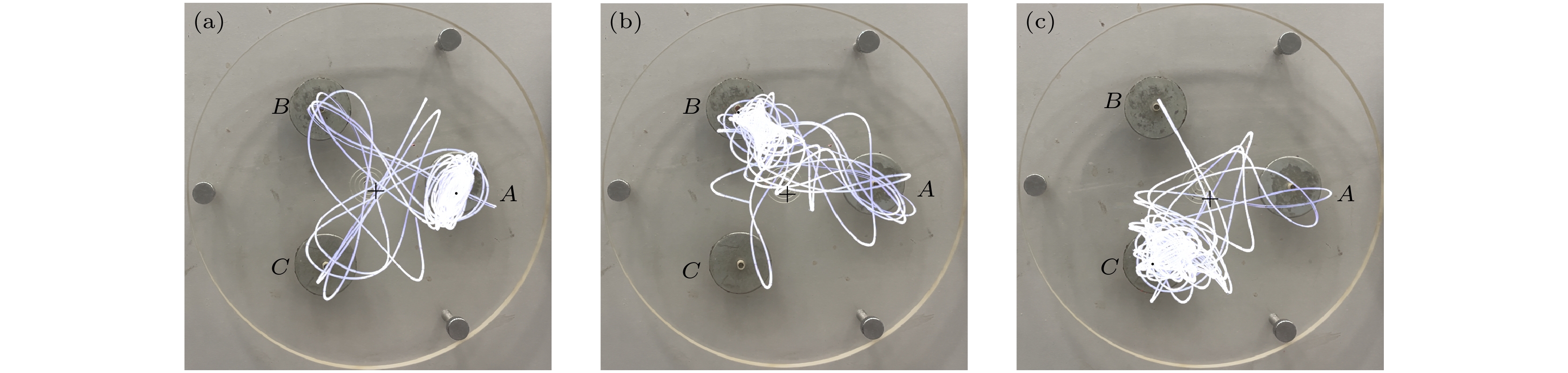
考虑一类等边三角形排布的典型磁力摆, 基于对其全局动力学行为的分析, 研究初值敏感性现象及其机制. 首先, 考虑磁铁位置可以移动, 利用牛顿第二定律建立该磁力摆动力学模型. 进而, 分析不同的磁铁位置所对应的平衡点个数及其稳定性. 在此基础上, 数值模拟初值敏感性现象和不动点吸引域随磁铁位置移动的演变规律. 最后, 通过实验验证该现象. 研究发现, 该类磁力摆普遍存在着多吸引子共存现象, 其初值敏感性可归因于其不动点吸引域的分形, 其中各不动点位置与磁铁中心投影到磁铁所在平面上的位置并不重合, 而是存在微小的偏差; 当摆球位置可投影到3个磁铁对应的等边三角形的形心时, 3个吸引子的吸引域尺寸相当, 呈中心对称状且分形, 因此初值敏感性现象很明显; 移动磁铁位置会直接影响到各吸引域的形态, 即离摆球平衡位置投影点近的磁铁对摆球影响最大, 离该位置最近的吸引子吸引域会明显变大, 而其他吸引子的吸引域则会被侵蚀消减. 本文的研究在磁力摆装置设计方面具有一定的应用价值.Based on the analysis of the global dynamic behavior of a typical magnetic pendulum with equilateral triangular arrangement, the initial sensitivity and its mechanism are studied. To begin with, assuming that the position of the magnet can be moved, the dynamical model of a typical magnetic pendulum is established via Newton’s second law. Furthermore, the number of equilibrium points under different magnet positions and their stability are analyzed. Upon this, the initial sensitivity phenomenon and the evolution of fractal basin of attraction of point attractors under different magnet positions are presented. Finally, the initial sensitivity phenomenon is verified experimentally. It is found that the coexistence of multiple attractors generally appears in this type of magnetic pendulum. The initial sensitivity can be attributed to the fractal basin of attraction of fixed point attractors, in which the positions of the fixed point attractors do not overlap with the projected positions of the center of the magnet on the plane where the magnet is located, but there is a slight deviation. When the position of the swing ball can be projected onto the centroids of three equilateral triangles corresponding to the magnets, the sizes of the three attractors’ attraction domains will be similar, whose boundaries are fractal and centrosymmetric, thus, the initial sensitivity is obvious. It also follows that the position of moving magnet affects the nature of basin of attraction directly, i.e., the magnet which is closest to the projection point of the balance position of the swing ball has a great influence on the swing ball: the domain of attraction of the attractor whose is the closest to the position will increase significantly, while the attractor domains of the other attractors will be eroded obviously. This paper has potential applications in designing the magnetic pendulum systems.
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] -
序号组别 移动距离 磁铁中心投影到$ xy $平面的位置 0 $ {d_o} = 0 $ $ (x_o^A, \;y_o^A) = (2\sqrt 3 /3, \;0) $, $ (x_o^B, \;y_o^B) = ( - \sqrt 3 /3, \;1) $, $ (x_o^C, \;y_o^C) = ( - \sqrt 3 /3, \; - 1) $ 1 $ {d_{{L_1}}} = - \sqrt 3 /3 $ $ (x_{{L_1}}^A, \;y_o^A) = (\sqrt 3 /3, \;0) $, $ (x_{{L_1}}^B, \;y_o^B) = ( - 2\sqrt 3 /3, \;1) $, $ (x_{{L_1}}^C, \;y_o^C) = ( - 2\sqrt 3 /3, \; - 1) $ 2 $ {d_{{L_2}}} = - 2\sqrt 3 /3 $ $ (x_{{L_2}}^A, \;y_o^A) = (0, \;0) $, $ (x_{{L_2}}^B, \;y_o^B) = ( - \sqrt 3, \;1) $, $ (x_{{L_2}}^C, \;y_o^C) = ( - \sqrt 3, \; - 1) $ 3 $ {d_{{L_3}}} = - \sqrt 3 $ $ (x_{{L_3}}^A, \;y_o^A) = ( - \sqrt 3 /3, \;0) $, $ (x_{{L_3}}^B, \;y_o^B) = ( - 4\sqrt 3 /3, \;1) $, $ (x_{{L_3}}^C, \;y_o^C) = ( - 4\sqrt 3 /3, \; - 1) $ 4 $ {d_{{R_1}}} = \sqrt 3 /3 $ $ (x_{{R_1}}^A, \;y_o^A) = (\sqrt 3, \;0) $, $ (x_{{R_1}}^B, \;y_o^B) = (0, \;1) $, $ (x_{{R_1}}^C, \;y_o^C) = (0, \; - 1) $ 5 $ {d_{{R_2}}} = 2\sqrt 3 /3 $ $ (x_{{R_2}}^A, \;y_o^A) = (4\sqrt 3 /3, \;0) $, $ (x_{{R_2}}^A, \;y_o^B) = (\sqrt 3 /3, \;1) $, $ (x_{{R_2}}^C, \;y_o^C) = (\sqrt 3 /3, \; - 1) $ 6 $ {d_{{R_3}}} = \sqrt 3 $ $ (x_{{R_3}}^A, \;y_o^A) = (5\sqrt 3 /3, \;0) $, $ (x_{{R_3}}^B, \;y_o^B) = (2\sqrt 3 /3, \;1) $, $ (x_{{R_3}}^C, \;y_o^C) = (2\sqrt 3 /3, \; - 1) $  下载:
导出CSV
下载:
导出CSV
组别序号 移动距离 平衡点位置 0 $ {d_o} = 0 $ $ (\tilde x_o^1, \;\tilde y_o^1) = (1.139, \;0) $, $ (\tilde x_o^2, \;\tilde y_o^2) = ( - 0.570, \;0.986) $, $ (\tilde x_o^3, \;\tilde y_o^3) = ( - 0.570, \; - 0.986) $, $ (\tilde x_o^4, \;\tilde y_o^4) = (0.054, \;0.094) $, $ (\tilde x_o^5, \;\tilde y_o^5) = (0.054, \; - 0.094) $, $ (\tilde x_o^6, \;\tilde y_o^6) = ( - 0.108, \;0) $ 1 $ {d_{{L_1}}} = - \sqrt 3 /3 $ $ (\tilde x_{{L_1}}^1, \;\tilde y_{{L_1}}^1) = (0.566, \;0) $, $ (\tilde x_{{L_1}}^2, \;\tilde y_{{L_1}}^2) = ( - 1.142, \;0.986) $, $ (\tilde x_{{L_1}}^3, \;\tilde y_{{L_1}}^3) = ( - 1.142, \; - 0.986) $, $ (\tilde x_{{L_1}}^4, \;\tilde y_{{L_1}}^4) = ( - 0.521, \;0.343) $, $ (\tilde x_{{L_1}}^5, \;\tilde y_{{L_1}}^5) = ( - 0.521, \; - 0.343) $ 2 $ {d_{{L_2}}} = - 2\sqrt 3 /3 $ $ (\tilde x_{{L_2}}^1, \;\tilde y_{{L_2}}^1) = ( - 0.007, \;0) $, $ (\tilde x_{{L_2}}^2, \;\tilde y_{{L_2}}^2) = ( - 1.715, \;0.986) $, $ (\tilde x_{{L_2}}^3, \;\tilde y_{{L_2}}^3) = ( - 1.715, \; - 0.986) $, $ (\tilde x_{{L_2}}^4, \;\tilde y_{{L_2}}^4) = ( - 1.105, \;0.475) $, $ (\tilde x_{{L_2}}^5, \;\tilde y_{{L_2}}^5) = ( - 1.105, \; - 0.475) $ 3 $ {d_{{L_3}}} = - \sqrt 3 $ $ (\tilde x_{{L_3}}^1, \;\tilde y_{{L_3}}^1) = ( - 0.579, \;0) $, $ (\tilde x_{{L_3}}^2, \;\tilde y_{{L_3}}^2) = ( - 2.288, \;0.986) $, $ (\tilde x_{{L_3}}^3, \;\tilde y_{{L_3}}^3) = ( - 2.288, \; - 0.986) $, $ (\tilde x_{{L_3}}^4, \;\tilde y_{{L_3}}^4) = ( - 1.697, \;0.573) $, $ (\tilde x_{{L_3}}^5, \;\tilde y_{{L_3}}^5) = ( - 1.697, \; - 0.573) $ 4 $ {d_{{R_1}}} = \sqrt 3 /3 $ $ (\tilde x_{{R_1}}^1, \;\tilde y_{{R_1}}^1) = (1.712, \;0) $, $ (\tilde x_{{R_1}}^2, \;\tilde y_{{R_1}}^2) = (0.003, \;0.986) $, $ (\tilde x_{{R_1}}^3, \;\tilde y_{{R_1}}^3) = (0.003, \; - 0.986) $, $ (\tilde x_{{R_1}}^4, \;\tilde y_{{R_1}}^4) = (0.847, \;0) $, $ (\tilde x_{{R_1}}^5, \;\tilde y_{{R_1}}^5) = (0.177, \;0) $ 5 $ {d_{{R_2}}} = 2\sqrt 3 /3 $ $ (\tilde x_{{R_2}}^1, \;\tilde y_{{R_2}}^1) = (2.284, \;0) $, $ (\tilde x_{{R_2}}^2, \;\tilde y_{{R_2}}^2) = (0.576, \;0.986) $, $ (\tilde x_{{R_2}}^3, \;\tilde y_{{R_2}}^3) = (0.576, \; - 0.986) $, $ (\tilde x_{{R_2}}^4, \;\tilde y_{{R_2}}^4) = (1.541, \;0) $, $ (\tilde x_{{R_2}}^5, \;\tilde y_{{R_2}}^5) = (0.595, \;0) $ 6 $ {d_{{R_3}}} = \sqrt 3 $ $ (\tilde x_{{R_3}}^1, \;\tilde y_{{R_3}}^1) = (2.857, \;0) $, $ (\tilde x_{{R_3}}^2, \;\tilde y_{{R_3}}^2) = (1.149, \;0.986) $, $ (\tilde x_{{R_3}}^3, \;\tilde y_{{R_3}}^3) = (1.149, \; - 0.986) $, $ (\tilde x_{{R_3}}^4, \;\tilde y_{{R_3}}^4) = (2.200, \;0) $, $ (\tilde x_{{R_3}}^5, \;\tilde y_{{R_3}}^5) = (1.025, \;0) $ 下载:
导出CSV
序号组别 平衡点位置 平衡点特征值 特征子空间维数 稳定性 0 $ (\tilde x_o^1, \;\tilde y_o^1) $ $\lambda _{1, \;2}^1 = \pm 2.61{\rm{i} }$, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_o^2, \;\tilde y_o^2) $ $ \lambda _{1, \;2}^2 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 1.07{\rm{i}} $ 4 稳定 $ (\tilde x_o^3, \;\tilde y_o^3) $ $ \lambda _{1, \;2}^3 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 1.07{\rm{i}} $ 4 稳定 1 $ (\tilde x_{{L_1}}^1, \;\tilde y_{{L_1}}^1) $ $ \lambda _{1, \;2}^1 = \pm 6.28{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_1}}^2, \;\tilde y_{{L_1}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.53{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.87{\rm{i}} $ 4 稳定 $ (\tilde x_{{L_1}}^3, \;\tilde y_{{L_1}}^3) $ $ \lambda _{1, \;2}^3 = \pm 1.53{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 0.87{\rm{i}} $ 4 稳定 2 $ (\tilde x_{{L_2}}^1, \;\tilde y_{{L_2}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.52{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_2}}^2, \;\tilde y_{{L_2}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.09{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.49{\rm{i}} $ 4 稳定 $ (\tilde x_{{L_2}}^3, \;\tilde y_{{L_2}}^3) $ $\lambda _{1, \;2}^3 = \pm 1.09{\rm{i} }$, $\lambda _{3, \;4}^3 = \pm 0.49{\rm{i} }$ 4 稳定 3 $ (\tilde x_{{L_3}}^1, \tilde y_{{L_3}}^1) $ $\lambda _{1, \;2}^1 = \pm 6.39{\rm{i} }$, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_3}}^2, \tilde y_{{L_3}}^2) $ $\lambda _{1, \;2}^2 = \pm 0.80{\rm{i} }$, $\lambda _{3, \;4}^2 = \pm 0.28{\rm{i} }$ 4 稳定 $ (\tilde x_{{L_3}}^3, \tilde y_{{L_3}}^3) $ $\lambda _{1, \;2}^3 = \pm 0.80{\rm{i} }$, $\lambda _{3, \;4}^3 = \pm 0.28{\rm{i} }$ 4 稳定 4 $ (\tilde x_{{R_1}}^1, \tilde y_{{R_1}}^1) $ $ \lambda _{1, \;2}^1 = \pm 1.47{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_1}}^2, \tilde y_{{R_1}}^2) $ $ \lambda _{1, \;2}^2 = \pm 3.18{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.01{\rm{i}} $ 4 稳定 $ (\tilde x_{{R_1}}^3, \tilde y_{{R_1}}^3) $ $\lambda _{1, \;2}^3 = \pm 3.18{\rm{i} }$, $ \lambda _{3, \;4}^3 = \pm 0.01{\rm{i}} $ 4 稳定 5 $ (\tilde x_{{R_2}}^1, \;\tilde y_{{R_2}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.96{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_2}}^2, \;\tilde y_{{R_2}}^2) $ $ \lambda _{1, \;2}^2 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 1.08{\rm{i}} $ 4 稳定 $ (\tilde x_{{R_2}}^3, \;\tilde y_{{R_2}}^3) $ $ \lambda _{1, \;2}^3 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 1.08{\rm{i}} $ 4 稳定 6 $ (\tilde x_{{R_3}}^1, \;\tilde y_{{R_3}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.69{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_3}}^2, \;\tilde y_{{R_3}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.54{\rm{i}} $, $\lambda _{3, \;4}^2 = \pm 0.87{\rm{i} }$ 4 稳定 $ (\tilde x_{{R_3}}^3, \;\tilde y_{{R_3}}^3) $ $ \lambda _{1, \;2}^3 = \pm 1.54{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 0.87{\rm{i}} $ 4 稳定 下载:
导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26]

 下载:
下载:
计量
- 文章访问数:4720
- PDF下载量:95
- 被引次数:0