










-
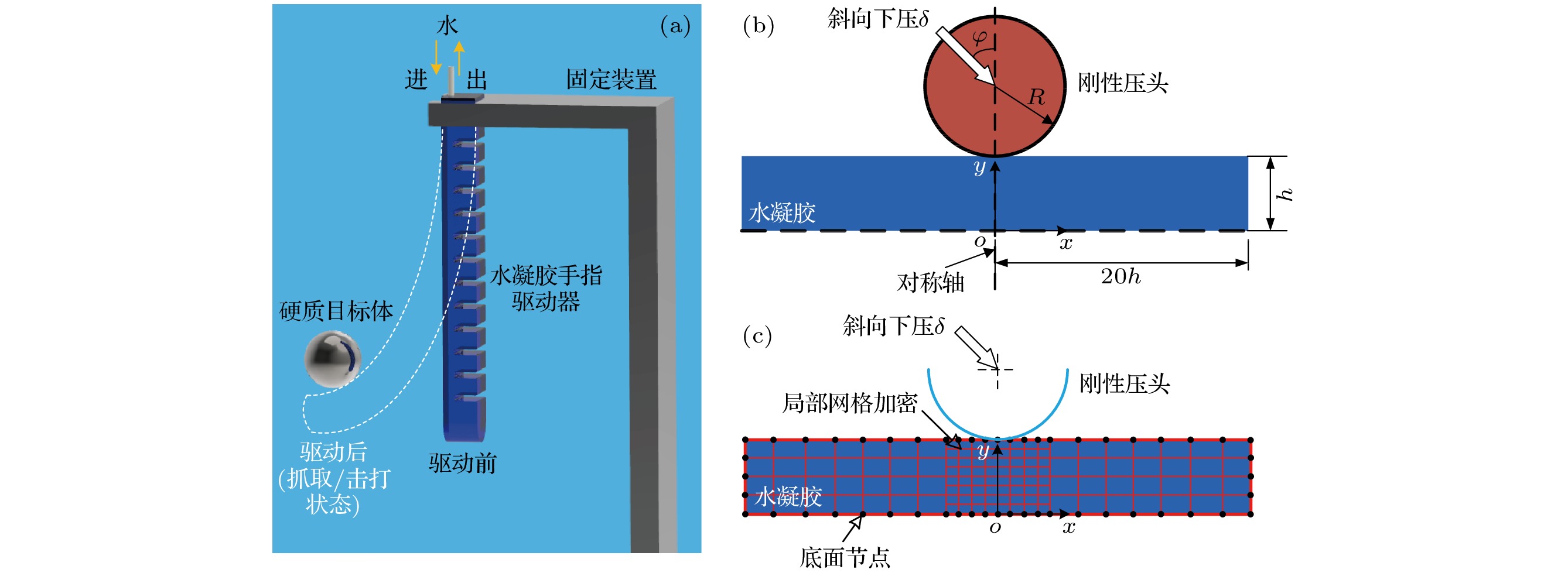
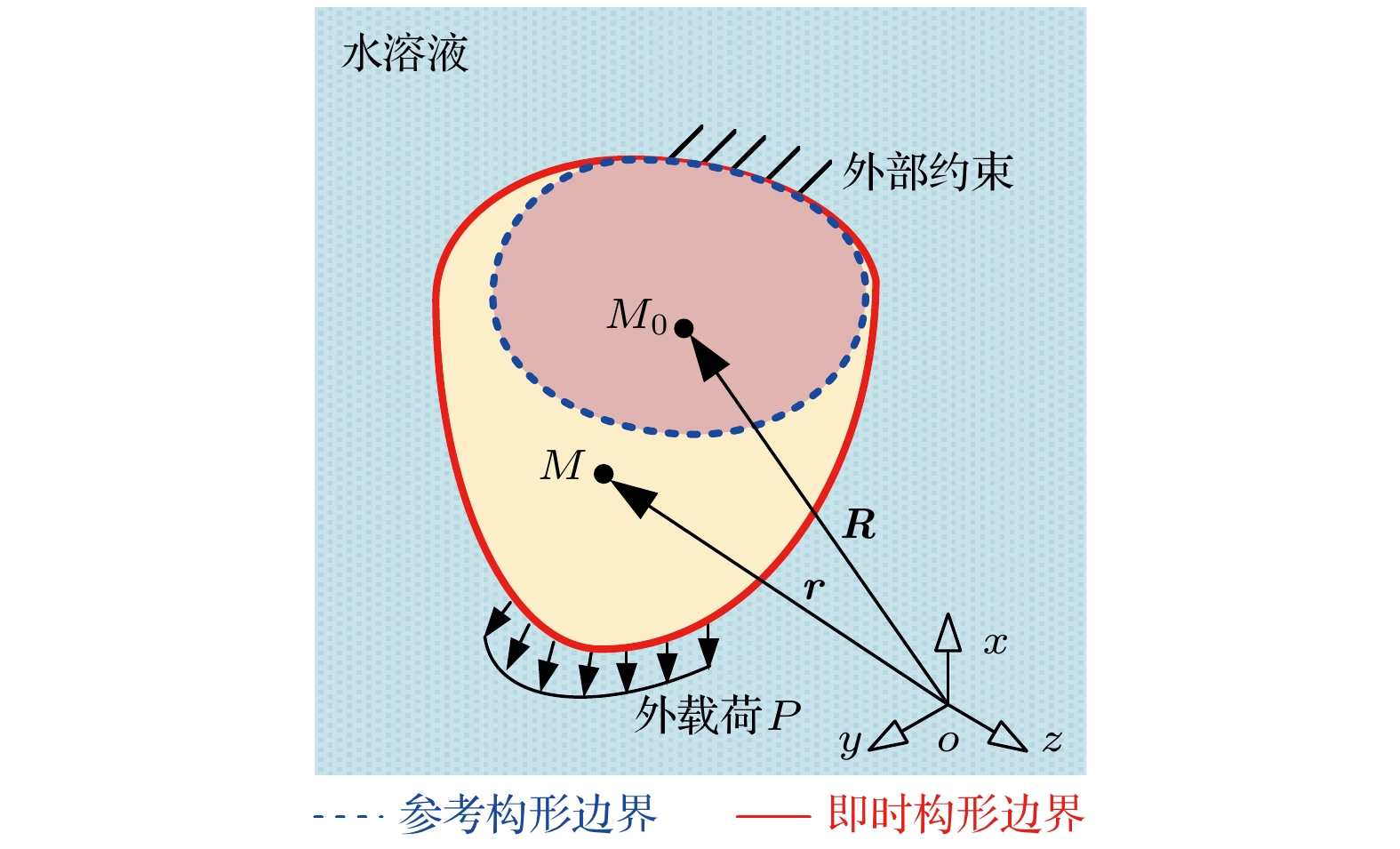
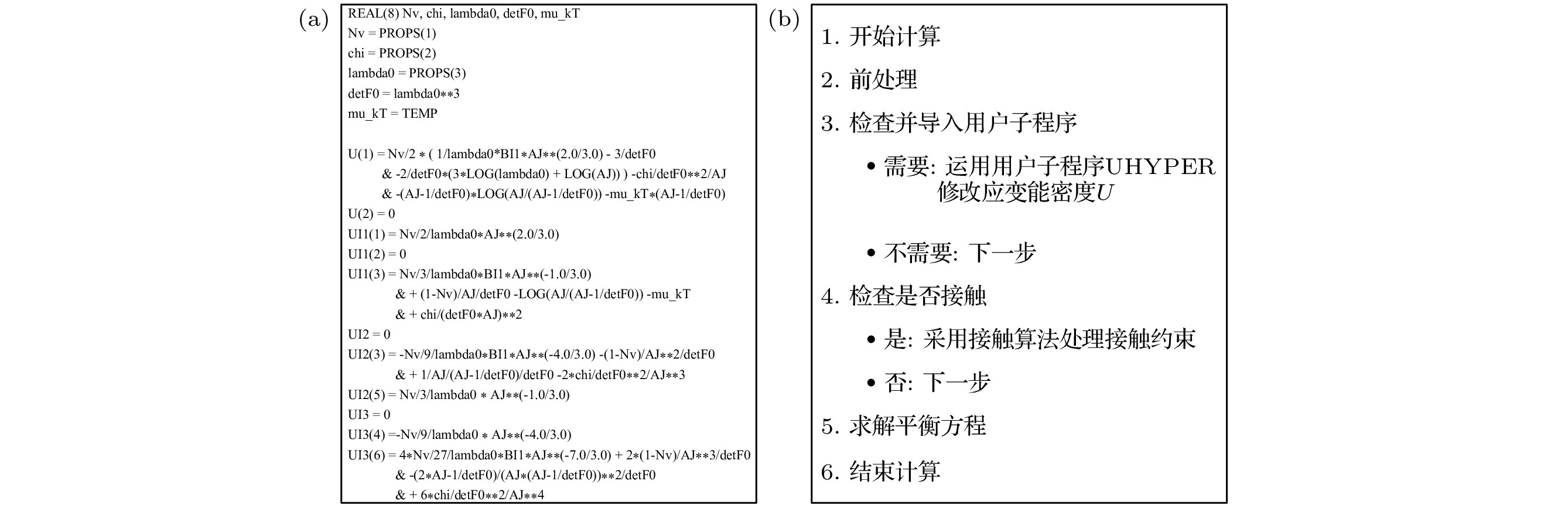
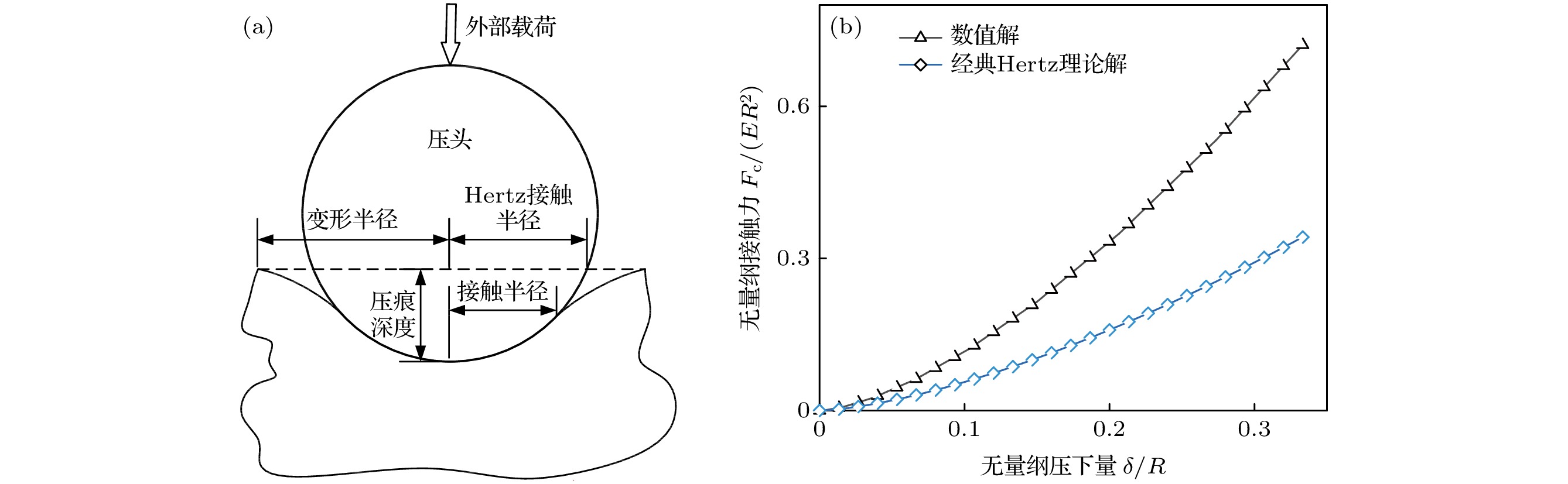
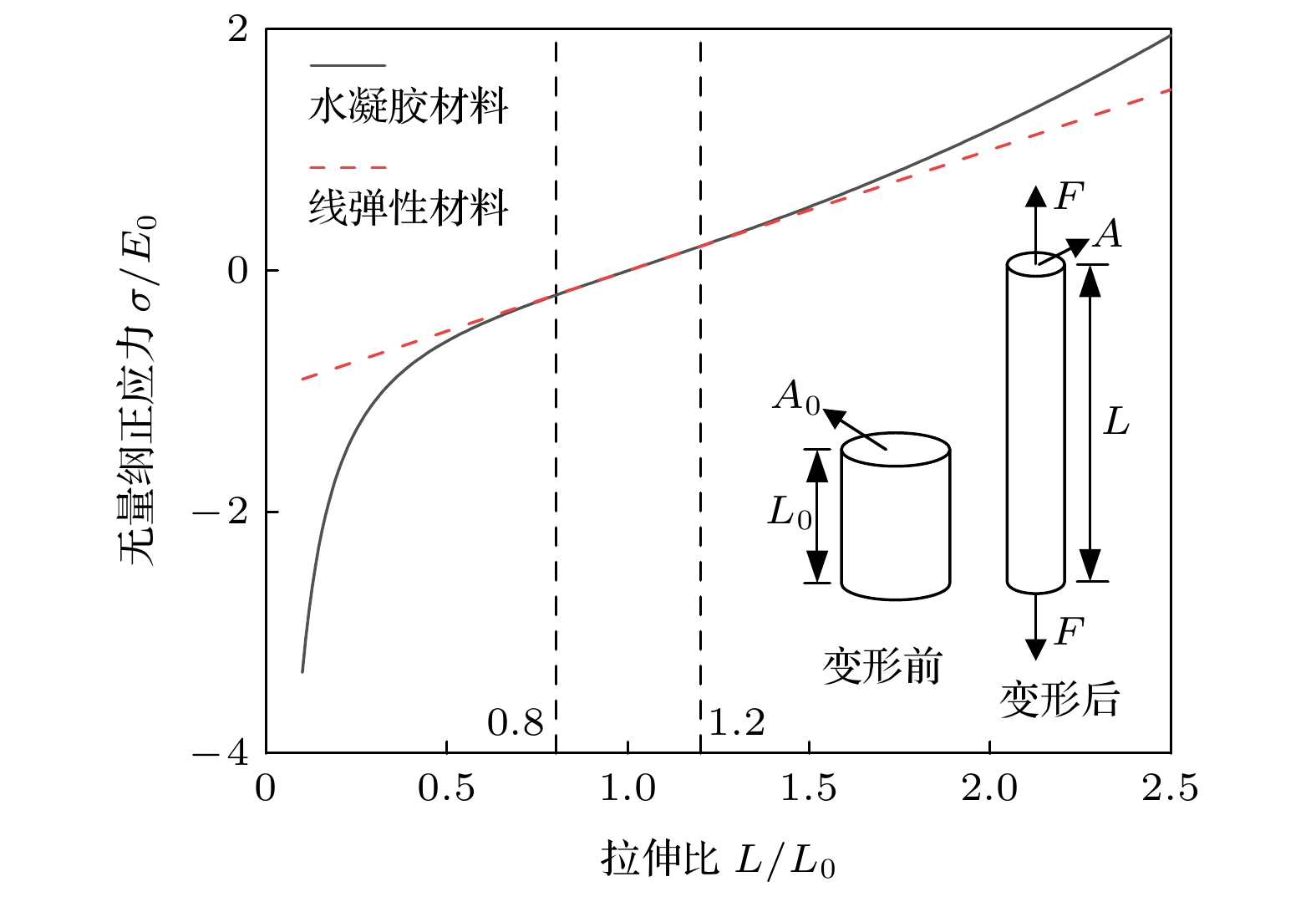
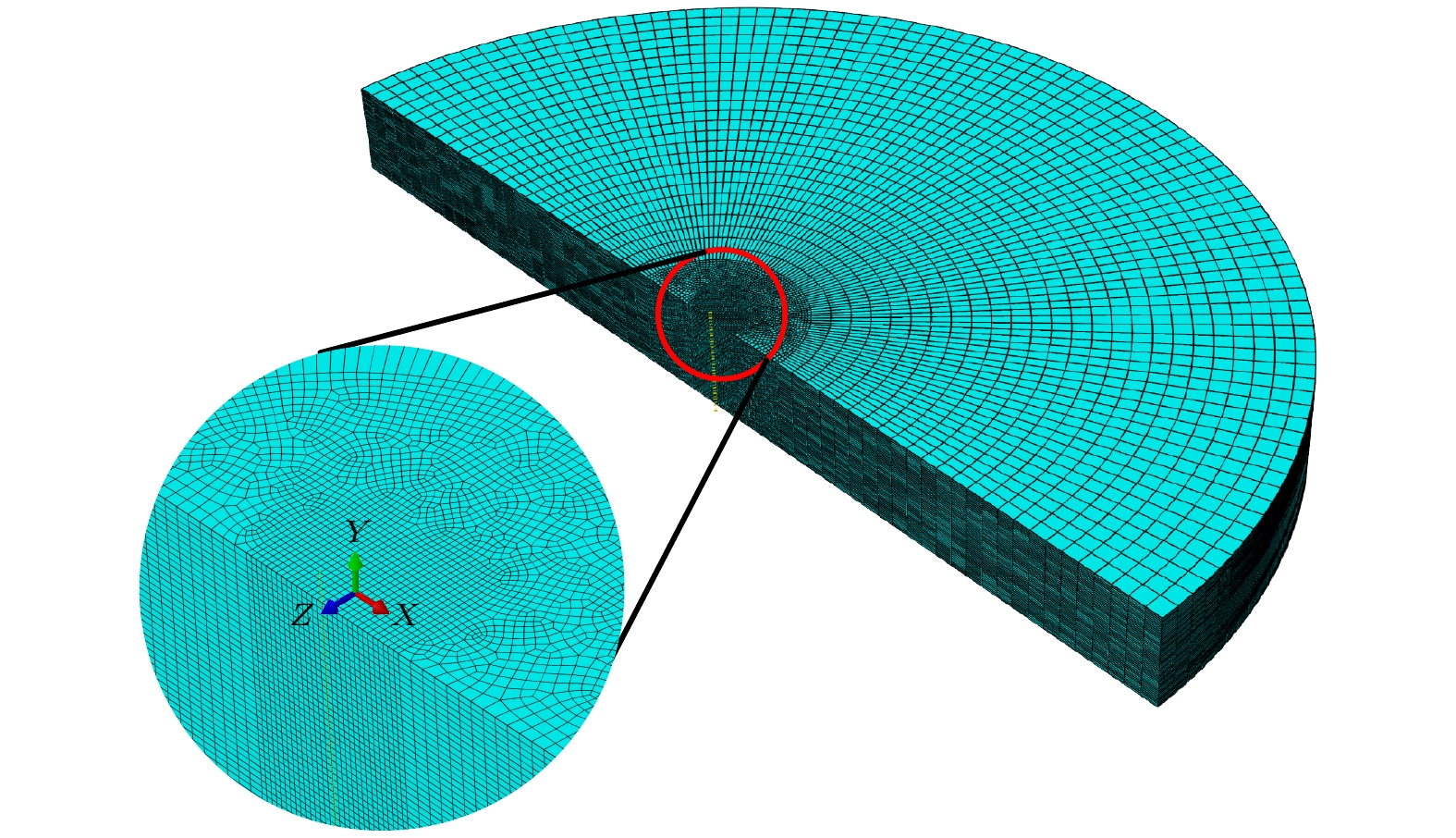
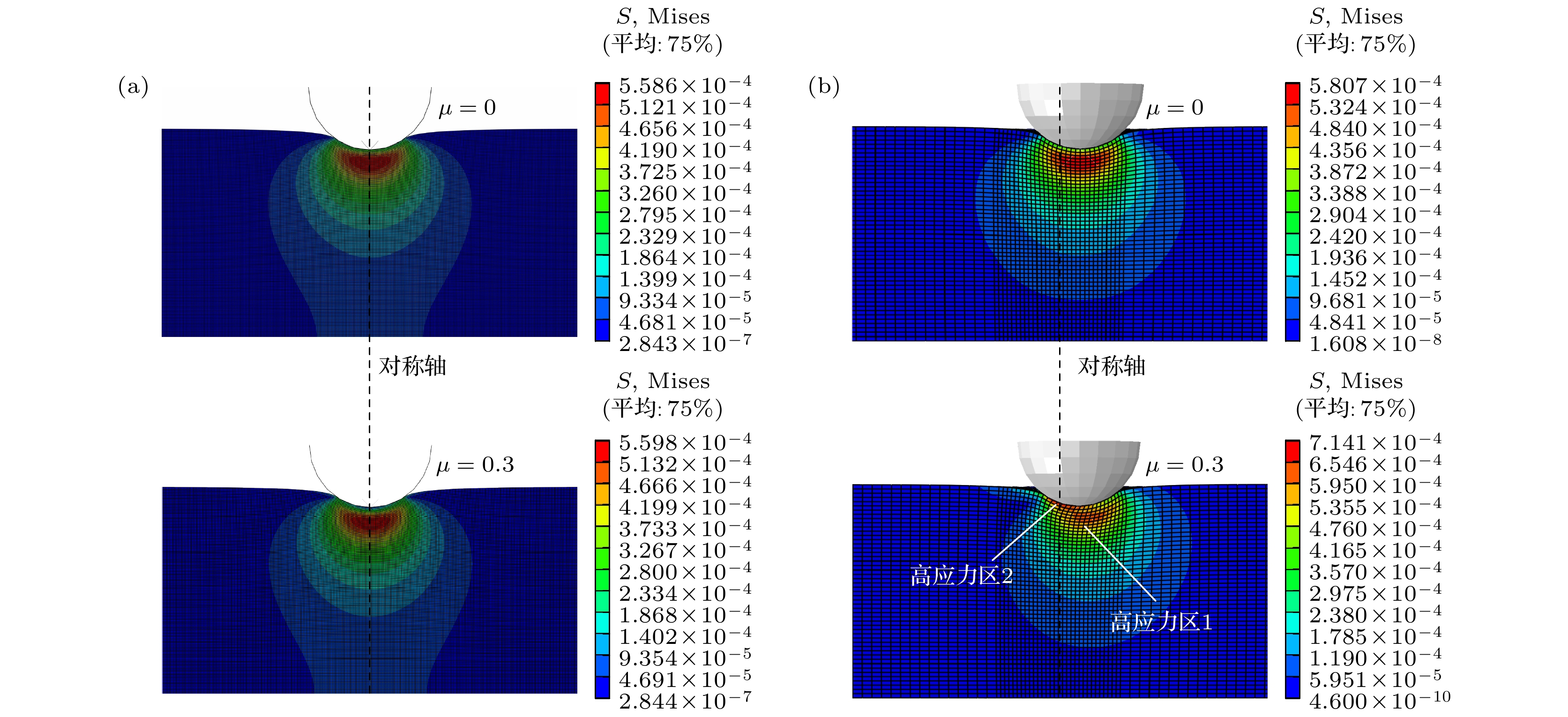
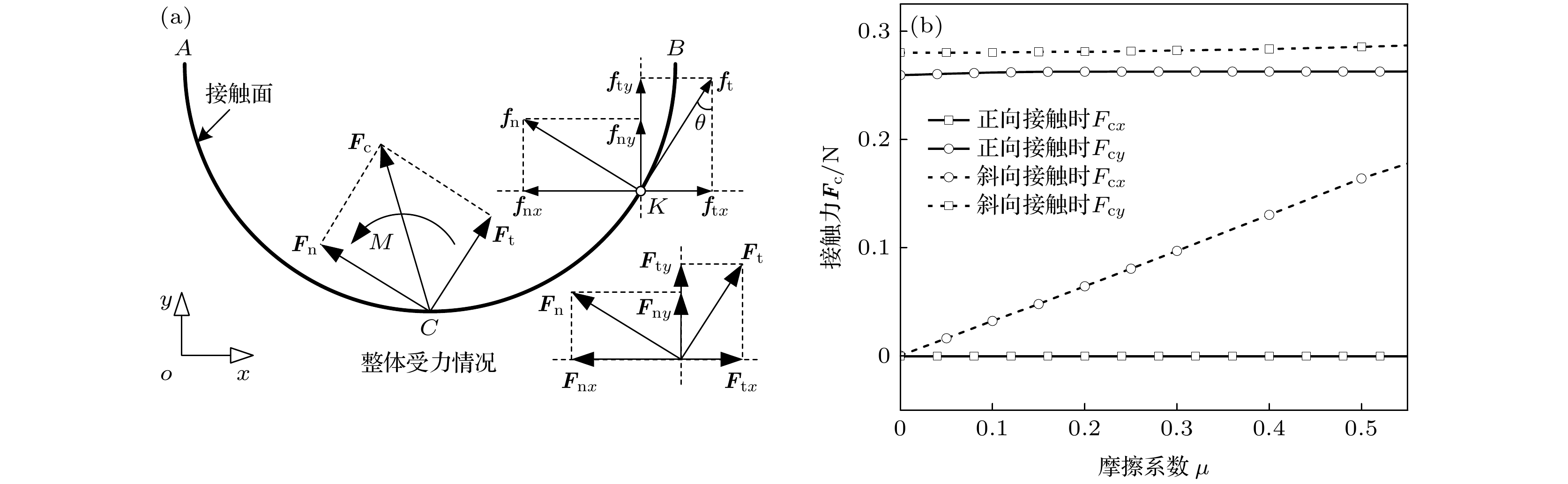
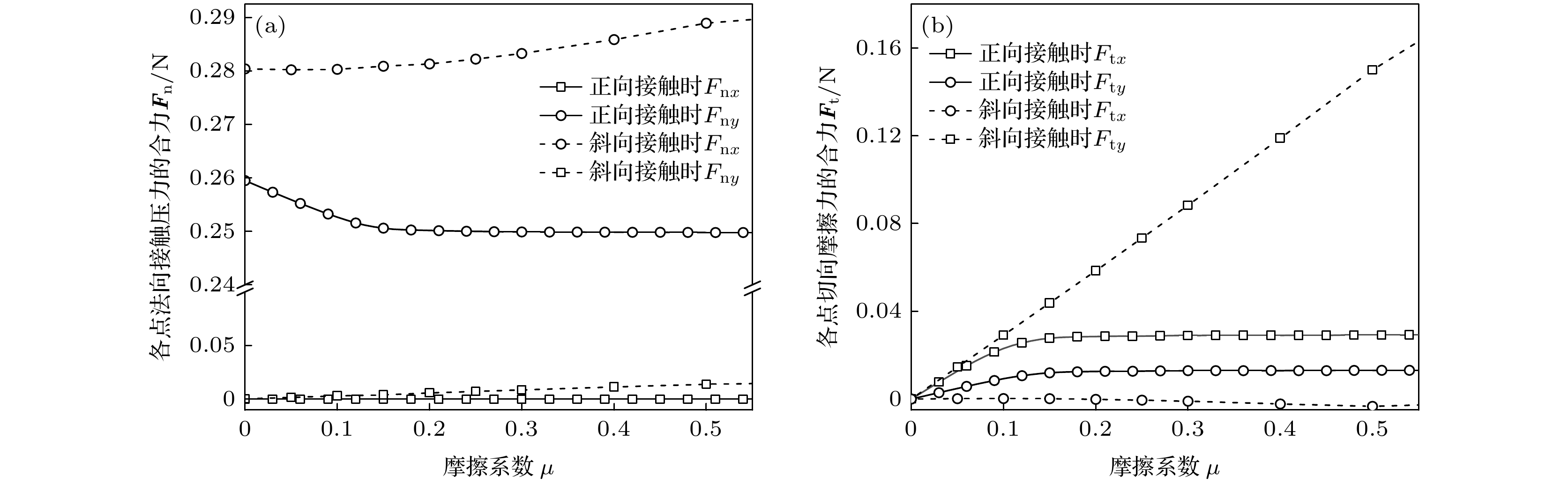
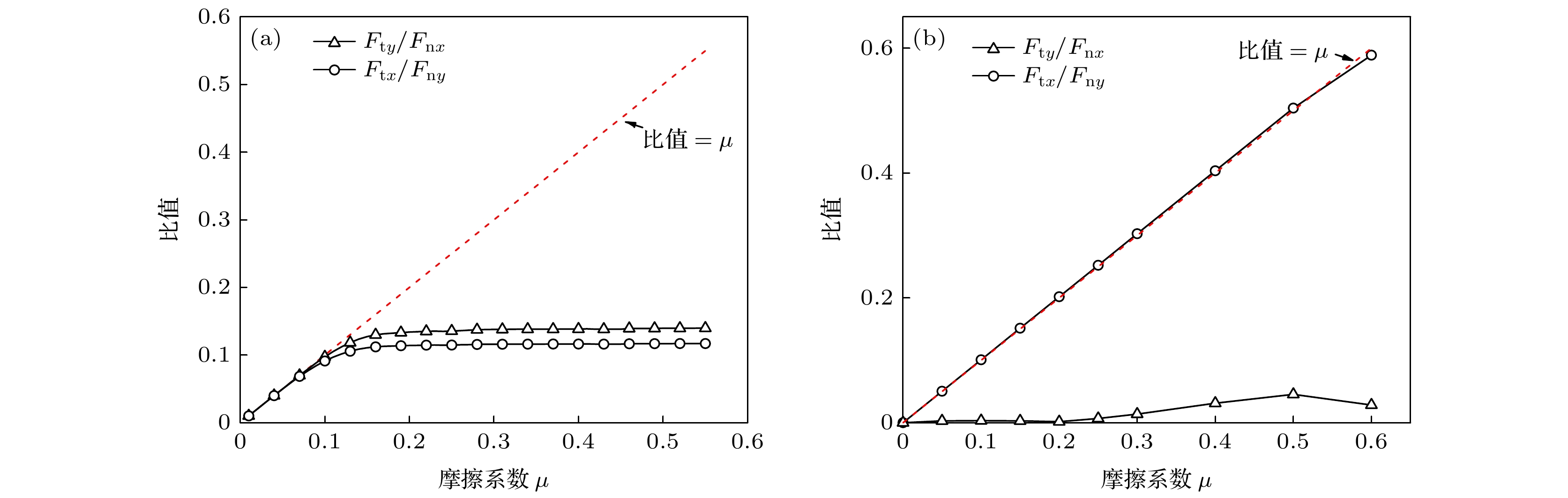
针对软体机器人用水凝胶含摩擦斜向接触问题, 建立了接触力学数值模型, 分析了水凝胶软材料斜向接触时的局部接触大变形及摩擦效应等非线性行为. 基于超弹性材料本构, 推导得到了水凝胶的更新自由能函数. 给出接触计算策略, 数值计算了刚性球状压头正向接触水凝胶和斜向接触水凝胶两个算例, 讨论了经典Hertz接触理论的适用性以及不同摩擦系数对接触区应力分布和接触状态的影响规律. 计算结果表明, 水凝胶的材料非线性以及大变形引起的几何非线性使得经典Hertz接触理论不再适用; 斜向接触时, 摩擦系数的增大会导致水凝胶内部应力的重新分布, 表现为最大应力位置由接触面下方转移到接触表面上, 同时使水凝胶内部和表面出现两个主要高应力区. 此外, 研究还发现当摩擦系数较小时( μ< 0.05), 水凝胶正向接触事件中所有接触点均处于静摩擦到滑动摩擦的极限状态, 而斜向接触事件中接触面的部分区域始终处于稳定静摩擦状态.Focusing on the oblique frictional contact problem of hydrogel for soft robot, a numerical contact model is developed to analyze the nonlinear behaviors including local contact large deformation and friction effect of hydrogel soft material during oblique contact. Based on the constitutive relation of hyperelastic material, the updated free energy function of hydrogel is derived. The contact algorithm is given to compute the contact responses of both collinear contact example and oblique contact example. The applicability of classical Hertz contact theory is discussed. The influence of coefficient of friction on the stress distribution of contact zone and the contact states of contact surface are also investigated. The numerical results show that the material nonlinearity and the geometric nonlinearity (i.e. large deformation) of hydrogel lead to the invalidation of classical Hertz contact theory. For the oblique contact, the internal stress grads of hydrogel will be redistributed as the coefficient of friction increases. Meanwhile, the maximum stress position moves from underside to the contact surface. Two high stress zones occur inside and on the contact surface at the same time, respectively. Besides, when the coefficient of friction is smaller (i.e. μ< 0.05), for the collinear contact all contact points on the contact surface are in critical state from static friction to dynamic friction. But for the oblique contact, some contact points are always in stable static friction state.
-
Keywords:
- hydrogel/
- large deformation/
- oblique contact/
- friction
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] -
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20]

 下载:
下载:
计量
- 文章访问数:5329
- PDF下载量:73
- 被引次数:0